AeriaGloria
-
Posts
5876 -
Joined
-
Last visited
-
Days Won
2
Content Type
Profiles
Forums
Events
Everything posted by AeriaGloria
-
That does look odd. What about your AOA gauge, it is frozen, is this the English cockpit bug this patch or is pitot heat or some other switch off perhaps? Either way, it’s stuck at 15 degrees, and with LEF flap down as we see in your turns the AOA limit should be 26 degrees. When it hits the AOA limit the stick and elevators are automatically tilted down 2 or 15 degrees depending on speed. It becoming “awake” part way into the mission also makes me suspect pitot tube freezing. Pitot tube freezing could also affect ARU and reduce elevator authority at speeds where it shouldn’t reduce it so much.
-
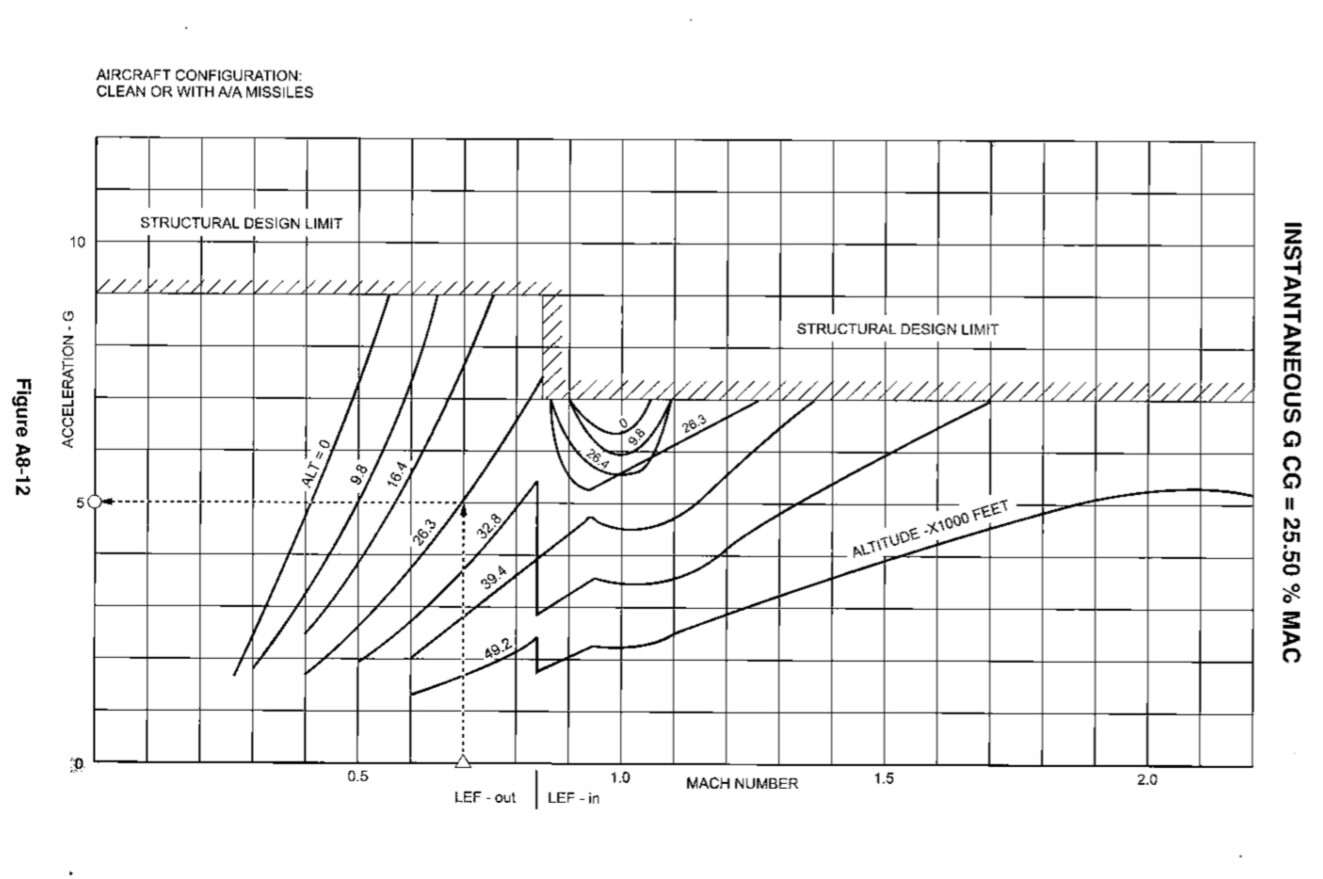
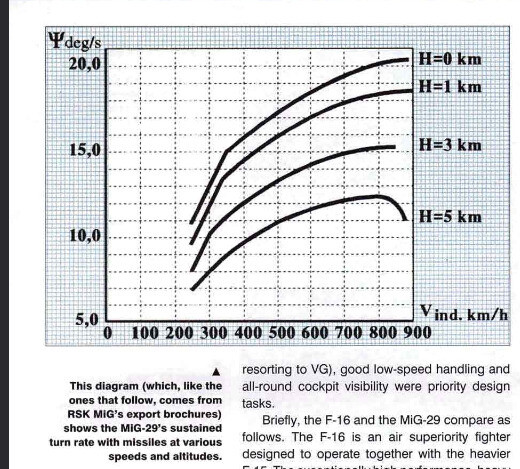
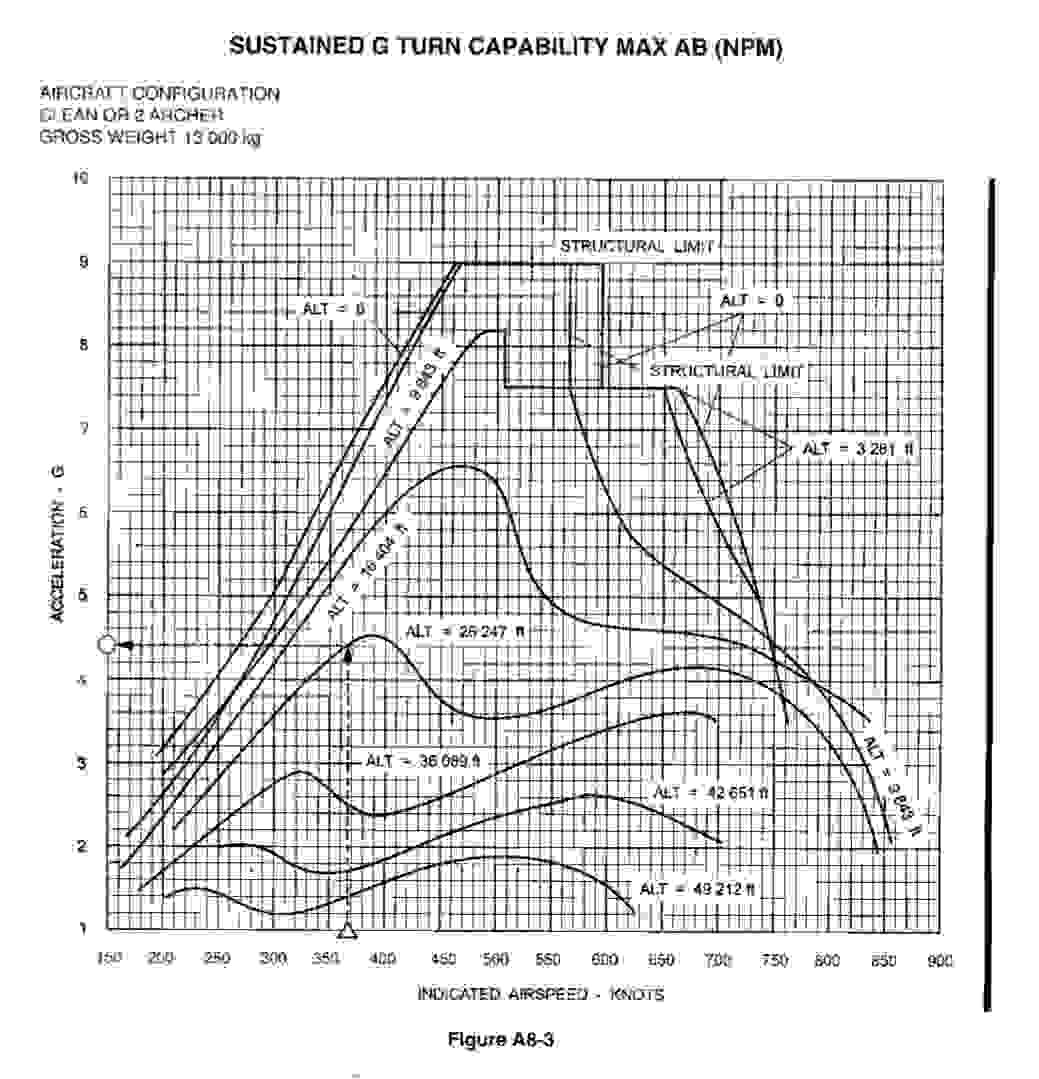
Hello, it seems to be that MiG-29 can not reach the stated instantaneous G load, and it is low enough that it also can’t reach the full envelope of the sustained turn rate numbers. Here is a track with 2x APU-470, and 2x R-60, and 50-55% fuel in order to reach 13,000 kg gross weight, which seems to be the most common testing metric other then the same with 2x R-73. in addition there is a max G load graph we see in both books and manuals that goes from below 300 kmh to 900 kmh, showing over 20 deg/s at 900 kmh “with missiles.” And there is a sentence in the “practical aerodynamics” manual that states: “For example, the maximum speed of turn in a steady position of the aircraft without weapon mounts at an altitude of 1,000m, Mach Number 0.8, with 50% of remaining fuel (aircraft weight 13,000 kg) is 19.5-20° a second.” Partway through the track I also jettison the R-60 to show a “without missile load” configuration. Images are from Yefim Gordon or GAF TO-1 from Amazon. According to instantaneous turn chart, we should approximately have little issue hitting 9 G at lower altitudes from around Mach 0.55-0.85, or around 700-1000 kmh at lower altitudes. And above this speed the transonic zone is reducing elevator authority until around Mach 1.05-1.1 (according to practical aerodynamics.) Instead, we are limited to basically 8 G from below 900 kmh, which should be our maximum rate 9 G speed. MiG29gload.trk

-
 Hello, F-14A 135 early shows up different then F-14A 135 and F-14B. Perhaps it just needs to be updated to 135 and B, I don’t know. 135/B shows as P+flashing X until it’s P+C during lock. 135 early shows as Solid X and F at a higher signal strength. One track “125early” is for 135 early, the other is 135 but SPO-15 would identical for F-14B F-14a125earlyspo15.trk F-14b135spo15.trk
Hello, F-14A 135 early shows up different then F-14A 135 and F-14B. Perhaps it just needs to be updated to 135 and B, I don’t know. 135/B shows as P+flashing X until it’s P+C during lock. 135 early shows as Solid X and F at a higher signal strength. One track “125early” is for 135 early, the other is 135 but SPO-15 would identical for F-14B F-14a125earlyspo15.trk F-14b135spo15.trk-
- 2
-

-
I get the feeling ED is referring to MPRF even as HPRF, basically, anything above LPRF, which was normal until the pulse Doppler age. Would love if anyone could tell me if this is feasible. SPO-15 in game shows same signal strength from front and rear antennas, however rear antennas are slightly weaker. I can upon a mention in a document about the bomber version of Beryoza which uses 16 identical azimuth antennas, so different then ours. However it says this equalizes signal strength between adjacent zones, so I wonder if this causing the equal signal strength, if it is in fact a real characteristic. Also helps explain why 85-95 degree emitter only does up close close beyond just being in side lobes. “The station is equipped with protection against false triggering of the receiving channels by weak signals received on the side lobes of the azimuth antennas. To achieve this, the input signals of all 16 channels are summed, the resulting signal is inverted, attenuated by a factor of Kpod, and fed as a suppression signal to the input circuits of all channels (Fig. 3). Signals received on the main lobes are attenuated slightly, while weak signals are suppressed. The gain of the suppression circuit, Kpod, is selected such that the signal reception areas of one sector and two adjacent sectors are equal.”
-
investigating Bombing solution seems to use Barometric Altitude only
AeriaGloria replied to ldnz's topic in Bugs and Problems
TOSS should still work, it uses same calculations as CCRP launch. After laser ranges and pitch up, the gyros remember long enough for the maneuver, or atleast, combat manual does not claim it functions any different and idk why it would need to. I would like to see if backup radar altimeter ranging works, but this seems to get in the way. -
Will upload track soon if I can, but pretty much see exactly what Kuky sees in his track. But the odd thing is, in invisible target gun mode (press ‘target acquisition depress button’ when in regular gun mode, allowing 12 degrees of lead rather then 6), this mode is incredibly precise. Bullets always right in center mass. This mode doesn’t highlight target but just shows a circle to put your crosshairs for perfect lead ( there is also a dot that does the same thing but more precise, when you have perfect aim and tone the dot will be in the middle of the crosshairs while the crosshairs are in the middle of the circle). It’s an option for those struggling with accuracy in the main gun mode atleast
-
There is also no way to disable proximity fuse. So if you intend to use missile against ground, the more vertical the attack the better so the proximity fuse isnt triggered too early. But who knows about DCS
-
Very nice!
-
.
-
The difference is 4% distance travelled error and 1.5 degree heading deviation per hour for fast align/dead reckoning mode, and 8 km distance error + 1 degree heading deviation for long align/INS mode. Not sure how worth it that difference is
-
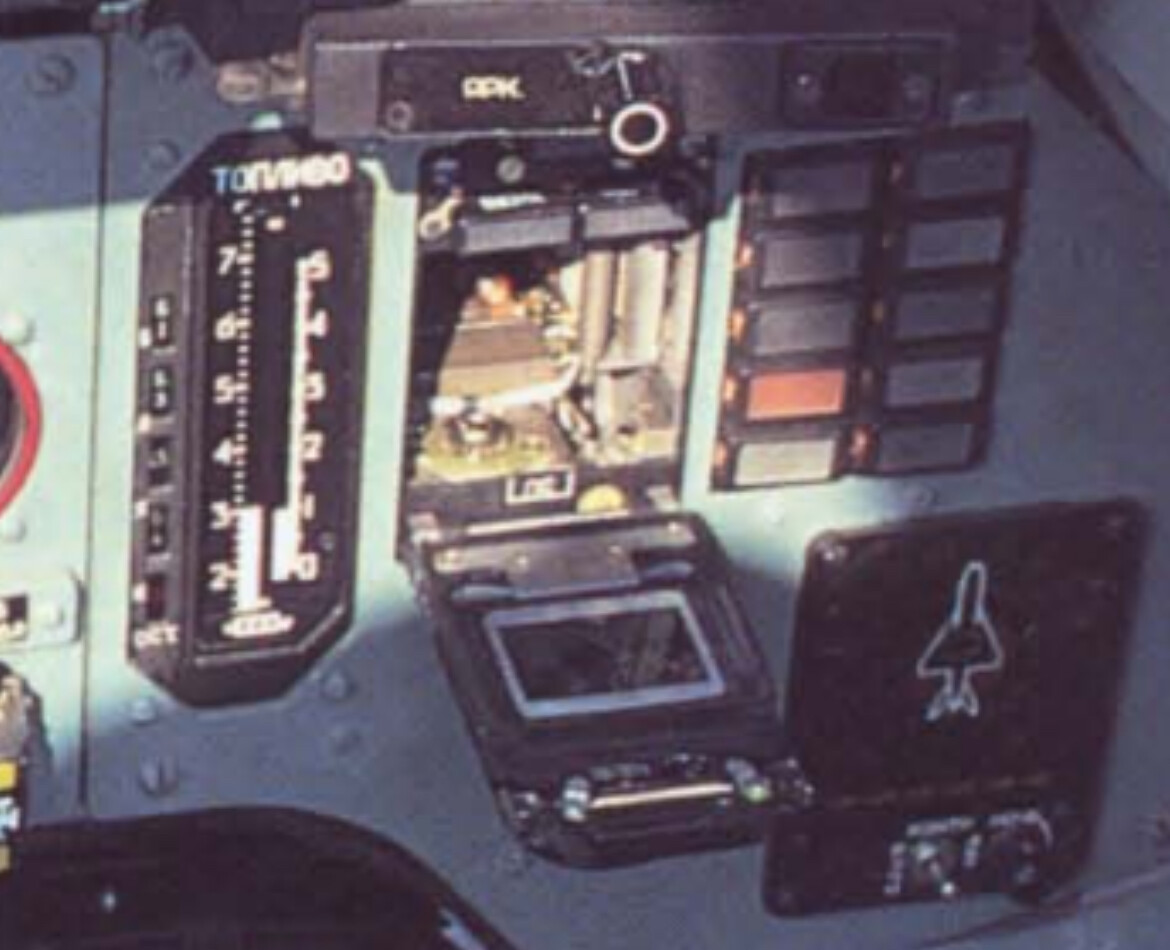
Yea. I just haven’t read the docs enough recently to remember if it also records the time data like Ka-50, or if that’s handled by flight recorder. Either way. It’s a pretty interesting solution. Palladium, backlight punctured film instead of displays, it’s practically steam punk in an 80s plane. Now those top 3 windows are proper LED displays I believe.
-
Well atleast we have one bomb to use that switch for lol. Would love more high drags to use.
-
It also works to move mode knob from radar to IRST, just not vice versa. I sometimes do it between IRST modes to see if i can reset from leading radar mode to leading IRST mode. Edit: on jamming subject. After much research and talk, APK is supposed to reduce range. Idk if implemented in DCS, but it’d only use is for angle jamming which is not present in DCS. Compensation switch is similar story, can be used with AP switch and is automatically activated by APK, but should have no function in DCS. So right now I believe, either keep AP switch off then move to AP when you see AP on HUD, or keep in AP (as document confirms that HUD shows no jamming targets when AP is in OFF/middle but only AP symbol). Comp and APK have no practical DCS use.
-
Nothing matters before you press lock. The “second thing” you mention, the pipper while lock is held, is the first step. 1. Hold lock button 2. put pipper you see while holding lock button on target for 3 s 3. release lock, aim and fire in 2-10 seconds You want the laser to atleast be on by the time you put the pre designation pipper (the pipper while you hold lock) on target for 3 seconds so it can know target movement speed and range. The laser will automatically trigger when 10 degrees nose down or more and atleast 32 seconds after the previous time the laser was used, and you just need to be aware it really only has 5 km range against ground targets. If they continue to fall behind, you can try moving the pre designation pipper from back to front of the ship during the 3 s so it thinks the ship is going slightly faster. Your movement during the 2-10 seconds of aiming also matter. For example, if you were to fire during the 2-10 seconds while moving your pipper from the bow to the stern (backwards movement across the ship), it will think the ship is slowing down and aim short. So just try to be as stable as you can, which i know is difficult. This is the reason the pipper seems to “lag” so much in this mode.
-
As far as I’ve figured out it seems basically In middle position, it will hide jamming lines but show “AP” to signal it sees jamming. Move it to either position down or up and you can finally see and lock jamming, though i found it hard to lock without using TWF/TWS which manuals suggest anyways. Both positions down and up seem same to me, and once locked the switch position doesn’t seem to matter. Any mode but head on seems useless for locking a jammer in order to use KMOD, you must already be banked 30-60 degrees.
-
It holds 18m of 35mm film, and that palladium tipped needle punctures it fast enough to write every message in half a second
-
Don’t know what you mean by first or second thing. You hold lock button. Put pipper on target for 3 seconds and release. For 2-10 seconds after you release lock the sight is corrected for wind or movement. It takes 2 seconds to calculate and is most accurate between 2-4 seconds. Just read in the newest manual version we should get S-5 rockets eventually.
-
Hehe, the Russian one was always good but now the English one is perfect. The main display of Eakran of this version is not LCD. See, the Eakran records things on film. The way it records things, is by punching holes with a palladium tipped needle. So what you are seeing is the film after it has been punctured by the palladium tipped needle with the message, and backlit with a yellow light! Then after flight you can open the Eakran, take the roll of film out as a perfect recording of the inflight failures and statuses.
-
Betab-shp is technically a high drag bomb. I can’t find its ballistic code in manuals. But i bet if you move the high drag (retard)/COOP switch forward it would work. You shouldn’t need to also move the switch forward for KMGU, but might have a good effect at certain altitudes and speeds.
-
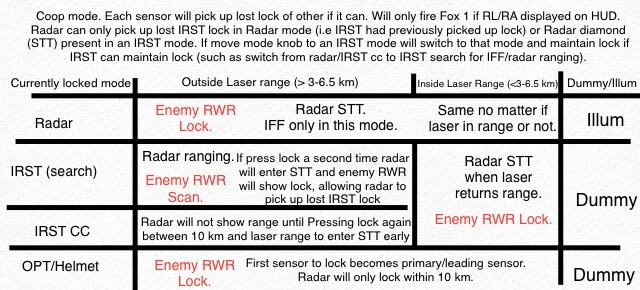
Here’s how I plan to test. Set at civil plane in a slow orbit or turn to 90 degrees. Set to no reaction to threat. Should allow me to figure out if it’s modeled yet. Yeah, basically the rules are, it will default to the mode you use as primary sensor (whatever what is shown on HUD) atleast at first. If it loses lock and secondary sensor picks it up then the previously secondary sensor is now primary. If the original primary sensor can re establish lock it will become primary again. Only real exceptions are Laser range, when it can range laser often radar will become primary as it is now longer needed for ranging pulses and goes STT. Or OPT/Helm, where the first sensor to lock becomes primary. You can see this now where if you lock within 30 degrees of nose often IRST locks first, and radar if beyond that limit. If you say locked IRST first, you will often see it transfer to radar primary beyond the 30 degree limit of IRST, but when the target goes back within the 30 degree gimbal limit of IRST the IRST becomes primary sensor again.
-
For KMGU, only the first “packet” drops on the pipper, and every other packet will drop after. So you will need to aim short to have all your submunitions land equally in front and behind the target even if things work perfect Of course in training mode doesn’t matter as it will only drop one “packet” at a time
-
I still have yet to test if being 5 degrees below enemy turns off notch filter yet Being in COOP 5 degrees low where radar doesn’t have notch or same speed filter, IRST good view, basically no hope for them to lose lock the only weakness for COOP i can really see is if they notch radar and flare the IRST at the same time. But obviously keeping that on the down low
-
Are you sure it has up and down positions. My interpretation is the gun trigger is the only folding trigger (thus first and second detent)
-
Almost every manual says the bottom position shouldn’t be used or has no function. German manual describes it identical to top position yet “narrows the jamming strip.”
-
Target altitude still shouldn’t need to be set, and you can always compensate for wind with pre designation.