All Activity
- Past hour
-
I’m trying to build a tachometer gauge for the Spitfire. I’m using a X27.168 and a Easydriverboard to connect to the Arduino. I found this code from The Simpit A10C YouTube and changed the address to match the output of the tachometer. The output on the physical device is fine between 1000 RPM and 2000RPM, after which the gauge is showing less RPM than in the simulator, and it never reaches 3000 RPM. In the line return map(newValue, 13107, 65535, 0, stepperConfig.maxSteps); the 0 is changed with 13107 because of the data from the simulator is never 0, but 20 % output as soon as the engine is running. And the gauge is still at it’s 0 point. I hope someone has an idea to make the tachometer work from 0-100% RPM #define DCSBIOS_IRQ_SERIAL #include <AccelStepper.h> #include "DcsBios.h" struct StepperConfig { unsigned int maxSteps; unsigned int acceleration; unsigned int maxSpeed; }; class Vid29Stepper : public DcsBios::Int16Buffer { private: AccelStepper& stepper; StepperConfig& stepperConfig; unsigned int (*map_function)(unsigned int); unsigned char initState; public: Vid29Stepper(unsigned int address, AccelStepper& stepper, StepperConfig& stepperConfig, unsigned int (*map_function)(unsigned int)) : Int16Buffer(address), stepper(stepper), stepperConfig(stepperConfig), map_function(map_function), initState(0) { } virtual void loop() { if (initState == 0) { // not initialized yet stepper.setMaxSpeed(stepperConfig.maxSpeed); stepper.setAcceleration(stepperConfig.acceleration); stepper.moveTo(-((long)stepperConfig.maxSteps)); initState = 1; } if (initState == 1) { // zeroing stepper.run(); if (stepper.currentPosition() <= -((long)stepperConfig.maxSteps)) { stepper.setCurrentPosition(0); initState = 2; stepper.moveTo(stepperConfig.maxSteps/2); } } if (initState == 2) { // running normally if (hasUpdatedData()) { unsigned int raw = getData(); // Hent RAW-værdi Serial.print("RAW: "); // Print label Serial.println(raw); // Print selve tallet unsigned int newPosition = map_function(getData()); newPosition = constrain(newPosition, 0, stepperConfig.maxSteps); stepper.moveTo(newPosition); } stepper.run(); } } }; /* modify below this line */ /* define stepper parameters multiple Vid29Stepper instances can share the same StepperConfig object */ struct StepperConfig stepperConfig = { 3900, // maxSteps 1000, // maxSpeed 1000 // acceleration }; // note cs im testing with 8 going to step (middle on easy drier) and 7 doing to direction (right on easy driver) // cs so in the code going on the basis that the first named number is step and the second is direction // define AccelStepper instance AccelStepper stepper(AccelStepper::DRIVER, 8, 7); // define Vid29Stepper class that uses the AccelStepper instance defined in the line above // +-- arbitrary name // | +-- Address of stepper data (from control reference) // | | +-- name of AccelStepper instance // v v v v-- StepperConfig struct instance Vid29Stepper apu(0x544e, stepper, stepperConfig, [](unsigned int newValue) -> unsigned int { /* this function needs to map newValue to the correct number of steps */ return map(newValue, 13107, 65535, 0, stepperConfig.maxSteps); }); void setup() { Serial.begin(115200); // Starter seriel monitor DcsBios::setup(); } void loop() { DcsBios::loop(); }
-
Да, новость мне знакома. Ну в данном случае мы рассматривали вопрос в контексте онлайн vs oнлайн Но честно говоря , данная тема вообще про конкретный самолет Миг-29. И в порыве неоднозначно реакции по поводу реализации СПО , как то незаметно переключились в непрофильное обсуждение. Могут заругать.
-
.thumb.jpg.cb0a333e49f8fe4950a6d35a67b02145.jpg)
DCS: F-16C Viper Screenshots and Videos (NO DISCUSSION)
Gözcü replied to wilbur81's topic in DCS: F-16C Viper
The horse thief doesn't know, look and learn.
-

Weather mod v17 for DCS
BlackFalco replied to bandit648's topic in Utility/Program Mods for DCS World
awesome thanks man. keep it up. -
Bring on the horse thieves.
-
Thanks guys, doing everything from the front seat with Jester! The videos really help.
-

new news when available DCS: F-16C Viper Manual
Pribs86 replied to =BoB= David's topic in DCS: F-16C Viper
Hi! So not to sound ungrateful, but I saw that you guys completely removed and replaced everything for the Litening Pod with the Sniper pod in the manual, instead of just adding the ATP. The Litening Pod doesn't even exist in the manual anymore. Why not just add them both so you can study either one depending on which one you would like to use? To have them both available for reference etc. Thanks! -
hello the crash is referencing ntdll.dll. i suggest running system file checker (fix 6 on the following link) from admin command prompt. try this first, let it fix errors, retry sim. https://www.drivereasy.com/knowledge/fix-ntdll-dll-crash-issue/
-
Release in 2026 but barely any info 6 months before 2026?
Mike Force Team replied to LimePartician's topic in DCS: F-35A
@szymixzmb Here is an example. It took Razbam eight (8) real-world years for the Mirage 2000. The same module that is now no longer available for sale in DCS. I know we want instant gratification right now, right here,this second. In the meantime, all we can do is wait. -
Release in 2026 but barely any info 6 months before 2026?
szymixzmb replied to LimePartician's topic in DCS: F-35A
That's the module I am expecting the most. I thought that I will never get but the best option is that we forget about it for 2 years and they will release it without any prior teaser. -
wooku joined the community
-
lol I get the sense actual spins aren’t taught at all flight schools, are they at yours? Mine did them dual from hour one, but had a rule that spins were prohibited for solo flights. The spin during the intro flight I believe was seen as a selling feature!
-
DLSS 4 global override easiest method without Nvidia bloatware
sleighzy replied to RealDCSpilot's topic in Virtual Reality
Old news. DCS natively supports this now. Add the below line to your C:\Users\username\Saved Games\DCS\Config\autoexec.cfg file to set the DLSS preset, this is still C by default. You will need to create this file if it does not already exist. DLSS_Preset = 'K' You can add this line as well if you don’t want DLSS applied to MFDs and HUD to keep them sharp with no ghosting for greater control. HUD_MFD_after_DLSS = true -
 hello, your computer is not referencing the correct IP address for cdn. you got 195.181.172.2 this is what i get. i am in eastern virginia usa. > cdn.digitalcombatsimulator.com Server: dns.google Address: 8.8.8.8 Non-authoritative answer: Name: 1231349722.rsc.cdn77.org Addresses: 2a02:6ea0:e200::36 2a02:6ea0:e200::17 2a02:6ea0:e200::37 109.61.91.195 109.61.91.230 109.61.91.197 Aliases: cdn.digitalcombatsimulator.com
hello, your computer is not referencing the correct IP address for cdn. you got 195.181.172.2 this is what i get. i am in eastern virginia usa. > cdn.digitalcombatsimulator.com Server: dns.google Address: 8.8.8.8 Non-authoritative answer: Name: 1231349722.rsc.cdn77.org Addresses: 2a02:6ea0:e200::36 2a02:6ea0:e200::17 2a02:6ea0:e200::37 109.61.91.195 109.61.91.230 109.61.91.197 Aliases: cdn.digitalcombatsimulator.com -
I will try that. Slick. 13 degrees. 75 knots. Every time. Thank you.
-
I´m already flying the F-1 in trial. I like it, it got a lot of feeling... i need to pull harder on the stick than in the F-5. It is more complex too, i got warnings every two minutes! lol but i guess its a matter of getting deeper in the manual once i buy it. There is though a very anoying thing that i didn´t remember from the last trial and it could be a no go for this plane for me... i understand the realism ( i like it) but they should have an option to avoid the insane amount of switch covers in the plane. If they did it with the landing gear and the gun trigger, why don´t do it with the rest???
-
no bug IHADSS gunner sight is not really match from pilot seat
LorenLuke replied to Danhopark323's topic in Bugs and Problems
I believe the monocle is calibrated to the right eye, so you need to boresight with the right eye for it to work. -

Landing the Mustang without nose into the ground
Terry Dactil replied to ex81's topic in DCS: P-51D Mustang
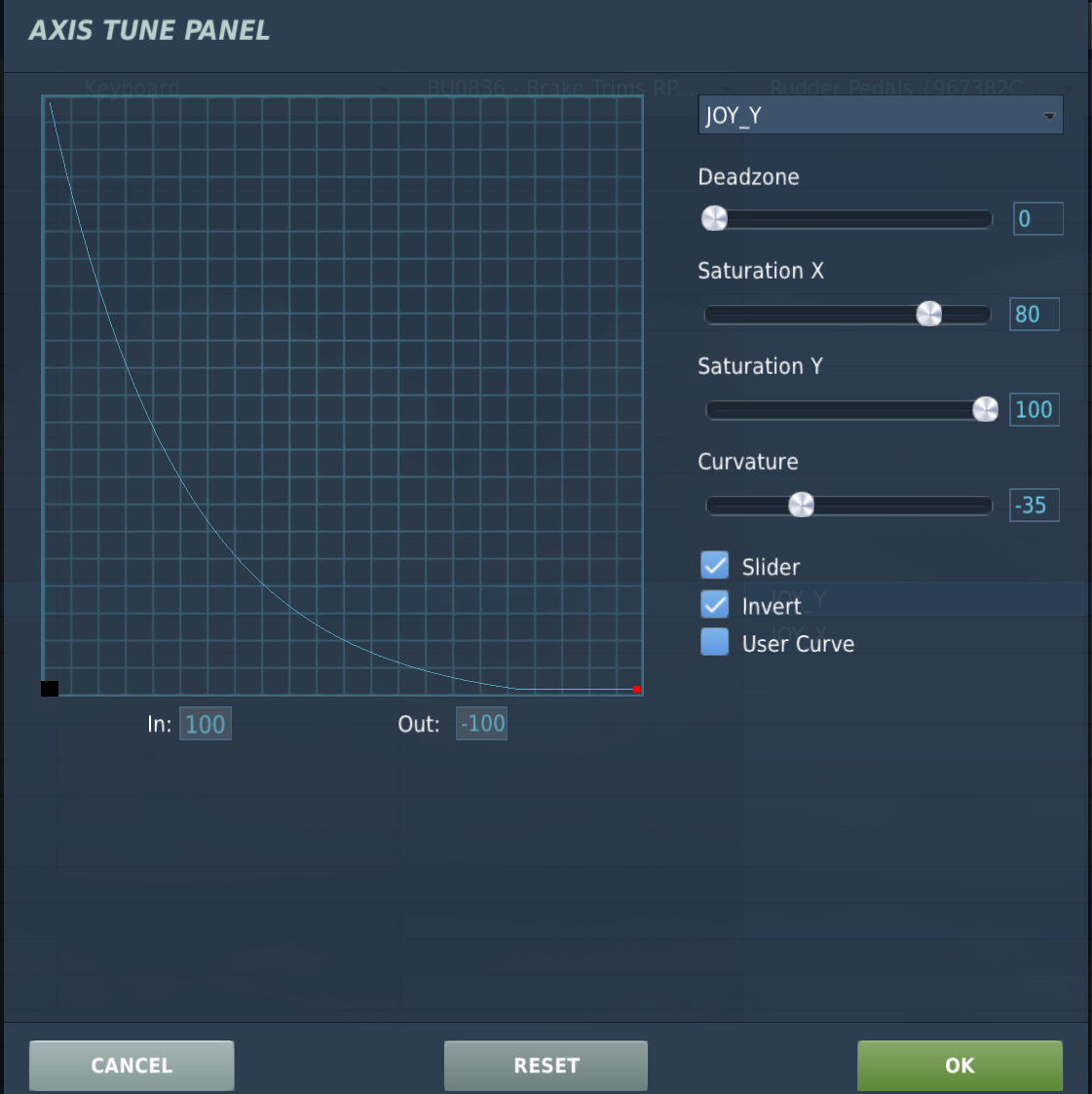
Yes. This is the type of setting that reduces the initial sensitivity but still allows maximum effect if required.
-
I will put it with all the other lists of demands, the team loves when I bring them up
- Today
-
The HVAR rocket pylons create drag and do reduce the maximum speed along with other drag effects. If you ever arm HVARs, even if you re-arm and remove them, or try a loadout without HVARs after landing from a mission you carried and fired them, you can never remove the pylons again. This means that after they are on the plane once, the pylons, and drag from them, remain until you get a new client. Can this be corrected?
-
Hi!! I think it´s not possible to try it yet, anyway if i need to pick one between two seaters i would pick the Tomcat xD Thanks for your comment!!
-
I'm going to pretend that you got an instructor to go up with you as a safety pilot and told them "I have to back my critique of a computer game!" It would've worked for me and at least I know said student would have been trying to kill me from the start.
-
[SLOW PERFORMANCE] Unusually long load times and close times
Moezilla replied to SOLIDKREATE's topic in Game Performance Bugs
Everything there looks as expected for HT off. Do you have anything influencing the CPU affinity of the DCS process, like Process Lasso, or an affinity bitmask? If that checks out then the next step, if you even want to take one at this point, would be to look at RAM settings, SSD speeds, and a BIOS update. If you are interested in getting it fixed, CPU-Z, and CrystalDiskInfo are good utils to get a read on your Mainboard+RAM, and storage setup, respectively. For context, my 5800X3D, on an ancient B450 mainboard with only 32GB RAM, took 36 seconds to load after the .12899 hotfix, as it rebuilt the shaders in the fxo folder. The 2nd load of .12899 took 20 seconds. -
Thank you for the effort! If you set it to correct as-is i hope you can give an updated table that i can use in the manual
-
Even still, I believe it applies, but I will look a little deeper before I say the final correct as-is, we did adjust this sometime ago with comments from Mover's video, I believe, all things considered, as mentioned, the team is happy.
-

waiting for resolution ED/RAZBAM Situation Info & Discussion
MiG21bisFishbedL replied to NineLine's topic in RAZBAM
Oh, wear a ski mask, too!