SnuggleFairy
-
Posts
118 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by SnuggleFairy
-
Attach a track of your startup
-

investigating Problem with "Auto turn to TGT"
SnuggleFairy replied to Bl4ckSp4rrow's topic in Bugs and Problems
yes, the "Helicopter Coordinate Corrections" chapter in the manual on page 10-30 explains the process of course correction, you just have to manually punch a Fix point into PVI. go to 16:00 of this video if you want a visual https://youtu.be/t3l8vjZEqUs -
investigating Problem with "Auto turn to TGT"
SnuggleFairy replied to Bl4ckSp4rrow's topic in Bugs and Problems
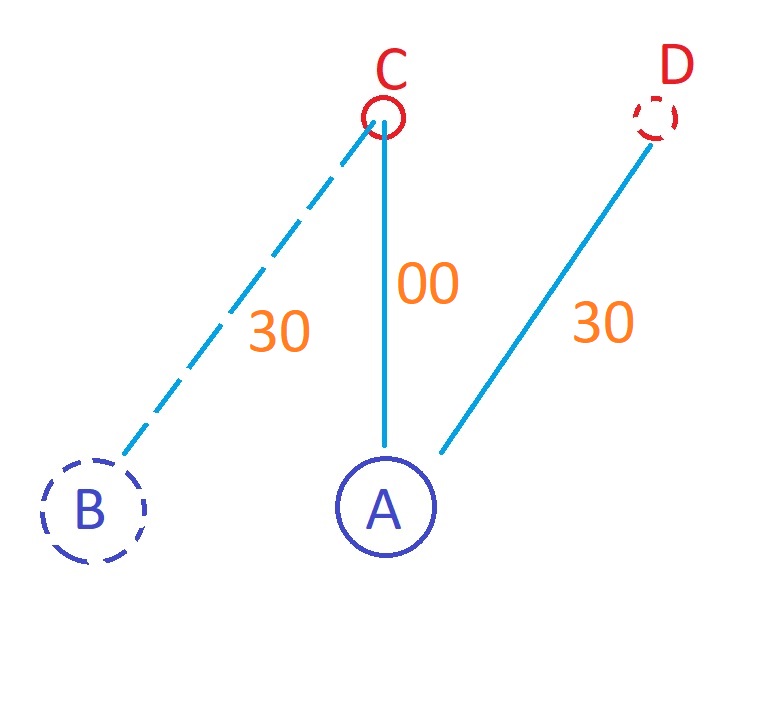
Let me try to explain what i think. Disclaimer first - i'm not a KA-50 designer or engineer, all of my knowledge comes from testing the Ka-50 in DCS and observing its behavior under various conditions. Targeting system and INS are one system. I think when you point your shkval at a point on the ground it gets coordinates of said point and calculates the heading it needs to turn to using the aircraft's current coordinates. Let's say you're hovering at the blue A circle and your target is directly north of you (red circle C). But your INS is out of alignment and it thinks you're to the left of your current position (Blue circle B), so it thinks the target is actually 30 degrees to the right and it turns you 30 degrees right pointing you at red circle D. I have no idea if that's how it actually supposed to work, but it seems to behave this way at this moment.
-
Да, вы совершенно правы. Проблема в том, что в данный момент ошибка накапливается буквально за 2 минуты полета/висения. И через 2 минуты после коррекции - даталинк и доворот не работают как должны
-
No, sorry, this is not the issue i'm having
-
In the track and video below I do a cold start and precise alignment with external power as per manual. After take off my heading is correct, my current coordinates are correct and the autopilot is taking me towards the waypoint 2 correctly. But within 2 minutes of flight it starts making a left turn with the designated heading reticle going left and the more you fly the more it gets confused where the aircraft is. If you switch to the current coordinates on the PVI, the values will be nothing like the values on the ABRIS - it thinks it's somewhere else. That deviation affects the datalink and the "turn on target" mode. I demonstrate how those modes behave in the video and the replay. After I create a reference point under myself by pulling coordinates from ABRIS and correct the deviation. The turn on target and datalink start working properly. More or less anyway. Datalink is not precise because in the time it takes me to save and "ingress" onto target (30 seconds max) the INS already accumulates an error and coordinates in ABRIS and PVI don't match again. I have no idea what the issue is exactly - cold start or precise alignment is buggy or what, but it drifts way too much, we can't correct it every kilometer of flight. Track: https://drive.google.com/file/d/1p7IF2RYokj7znBP12lhJfkF3AlUT9ul9/view?usp=sharing Video (HD still processing):
-
fixed datalink et target point useless
SnuggleFairy replied to Mavkruger's topic in Bugs and Problems
I do understand. But what you're missing is how abnormally fast the error accumulates. Something is wrong with that and that cases datalink issuess -
investigating Problem with "Auto turn to TGT"
SnuggleFairy replied to Bl4ckSp4rrow's topic in Bugs and Problems
Yeah it's definitely INS, you can have a misaligned INS and the auto-turn will not work properly. Then you can create a reference point under yourself and correct the INS without going anywhere and then the auto-turn will work properly but only for a few minutes until the INS drifts again. The drift is ridiculously fast for some reason -
fixed datalink et target point useless
SnuggleFairy replied to Mavkruger's topic in Bugs and Problems
Yeah i tried your track. The deviation is because of the INS error that accumulated in those couple minutes before you saved and ingressed onto the target. Yeah, it's that fast for some reason. If you zoom in on your ABRIS, you'll see that the saved "tank" is not quite where your laser is pointing. And when you ingress, it's even worse. It all comes down to your nav system thinking that you're in a different spot. Click on your current coordinates on the PVI and compare the values to the ones on the ABRIS - they'll be way off -
Индекс заданного курса никогда раньше не поворачивался в BS2 и сейчас не поворачивается в BS3. Кто-то ещё советовал ППМ на ПВИ выключать. Никогда раньше не надо было это делать и сейчас не надо - ни на что не влияет. Неверный доворот идёт из-за накопленной ошибки ИКВ. Сравните ваши координаты на АБРИСе и на ПВИ даже через пару минут координаты отличаются очень сильно. Ошибка накапливается с сумашедшей скоростью сейчас. Из-за этой же ошибки, плохо работает даталинк. Цели сохраняются не там куда подсвечивает лазер. И "выход" на цель через даталинк выводит шквал совершенно не туда. Опять же это из-за того что навигационная система думает что вертолет не там где мы на самом деле. Вы не успели накопить ошибку. Сделайте точную выставку вручную, полетайте 5 минут и попробуйте ещё.
-
Shkval drifting in Black Shark 3 - need help
SnuggleFairy replied to cdromer's topic in DCS: Ka-50 Black Shark 3
Can't really help without a track file. Put it here and i can try -
INU Alignment - Is accelerated enough?
SnuggleFairy replied to rrasfly2's topic in DCS: Ka-50 Black Shark 3
I'm achieving similar results. Something is messed up -
you cheated on her in her dream
-
In your track the engine didn't spool up at all. I took control, pressed the start button and nothing happened. Then i flicked the rotor brake switch up and back down, pressed the engine start and it spooled up just fine. Go into your controls, find the rotor brake and erase all bindings from there
-
@cobrabase there are a couple non essential switches you missed, but overall you're not doing anything wrong with the startup. Try this again and watch the blade RPM needle. If the needle drops below the bottom yellow line, the generators (they are tied to your main rotor) will not generate enough voltage and you'll get the failure warning. That happens if your engines don't generate enough power to overcome the load on your main rotor and keep the blades spinning. What's causing you specific situation is a number of factors: 1) Weight - even just at full fuel and no armament, you're pushing the engine limits in a hover. Hover take offs have very narrow power margins and i, personally, do rolling take offs like 90% of the time 2) Anti-dust eats minor power % from your engines 3) Engine Anti-ice eats a ton of power from your engines - this one is really a huge difference. But yeah basically you're fine, it's just the helicopter is struggling to get itself off the ground and you gotta find a way to help it. Like do a rolling take off, or reduce weight, or shut off deice Air conditioning is supposed to draw power, but I don't believe it does at this time. Or the difference is just unnoticeable
-
Линейкой меряешь, получаешь 44, вычитаешь 5 и получаешь 39. Вбиваешь 39 и летишь. посмотри на РМИ-2 КПН на приборной доске и сравни с показателями курса на F2 виде на нижней строке. На F2 показывается инстинный курс, а на КПН магнитный в данный момент
-
Turning it off doesn't return it to center. Only resetting trim does. It's the yaw channel. Try to never turn it on and you'll see the behavior disappear
-
Yaw autopilot does that. That's the precise reason why I don't use it. The way it works in real life is difficult to implement on our non force feedback rudder pedals, so imo the yaw autopilot channel is not usable in its current implementation
-
Там не точно 5. Дамаск 5.13, Алеппо 5.59. 300 местров это вполне неплохо.
-
Не плюс 3, а плюс 5 в Сирии. Т.е. нужно вычесть 5 после измерения линейкой, чтобы получить магнитный курс.
-
Make a short track of you trimming and post it here
-
Mi-24 NAV & Targeting system capabilities
SnuggleFairy replied to Bananabrai's topic in DCS: Mi-24P Hind
From what I understood, the synch button is "fast align" button. When in MAG mode the HSI is automatically aligning with the compass, but slowly and synch button just makes the process faster. There could be some other functions for this button, but I couldn't find anything except what I described above -
reported earlier KM-2 doesn't actually *DO* anything.
SnuggleFairy replied to randomTOTEN's topic in Bugs and Problems
I second that. No matter what values are set, no aircraft systems are affected -
Mi-24 NAV & Targeting system capabilities
SnuggleFairy replied to Bananabrai's topic in DCS: Mi-24P Hind
Oh yes, you're right, I'm not sure myself. Maybe ground crew does it? -
Mi-24 NAV & Targeting system capabilities
SnuggleFairy replied to Bananabrai's topic in DCS: Mi-24P Hind
For the Mi-24, there's a panel in the operator's seat, by his left shoulder