Focha
-
Posts
826 -
Joined
-
Last visited
-
Days Won
1
Content Type
Profiles
Forums
Events
Everything posted by Focha
-
CH-46, CH-47, CH-53 and most of all HH-3 E/F, specially with the F-14 coming out. Enviado do meu iPhone usando o Tapatalk
-
Either that or the sensor does not make any sense. A question, isn't the Harrier's screen when in Lightning pod green? Or is it like the A-10C black and whiteish? Enviado do meu iPhone usando o Tapatalk
-
I know, I am a real pilot too. :) I have those effects in the 350 also when training. The 412 it's like the 365, if you lose one hydraulic you have to land as soon as possible. But even so they are trying to simulate the interaction, for me the way it is now it's not the best way to be simulated. In the sim you can easily simulate the interaction between the cyclic and the collective, plus the pedals if they are hydraulic assisted (which I guess they are not in the Huey's case). The wobbling of the cyclic is just random, had it gets my nerves. :P Because if you try to apply what you learn in real life, it does not matter, because you will end up with its random effect, you have to apply huge amount of cyclic just to deal with the randomness of the wobbling. I guess there is a bit of lag, but the wandering cyclic its just too much. It's like you have a broken linkage in the rotor mast, that would be a good simulation if it was the case. IRL you have thought time to control the helicopter but you have control, like you said, small inputs and not trying to correct each and every move. So I guess if they add lag to cyclic and collective, plus the interaction between those, it would be by far a more realistic approach to what a loss of hydraulic system would be.
-
Hi all, This is specially for the ED team. DCS as expanded way beyond from the first days of LOMAC/FC. We now days have multiple modules either produced by ED or third parties. With this growing the current activation/deactivation process is quickly becoming obsolete. Anyone who have had to format the disk know that is a time consuming process to deactivate all the modules and sometimes just don't do it. The reverse also applies, with the difference that is obligatory to do it if you want the modules active. I don't have advanced knowledge in what the process involved in the StarForce is but I assume that by this time it should be different as you have a login inside DCS executable and the modules owned are showed there. By now I only have a few activation left due to this problem, except in one module, Mig-21 which got replenished. But that is not the problem since if you run out of activations, this will happen, unless you have to insert the keys for different versions of DCS, in that case you will have to wait one month to be able to active, but I am not sure if that happens. So, is it possible to ED to create a new activation/deactivation system more current and less time consuming? Thank you for your attention on this matter. Kind regards.
-
Does anyone knows how to correct this problem: https://forums.eagle.ru/showpost.php?p=3079426&postcount=6 Thank you.
-
Yes you struggle to control the helicopter if you are in hover for example or at greater than 80 KIAS speed. You have to be precise with brute force in hover, and just have brute force >80 KIAS. Usually in real life, you make a running landing, with some forward speed, ~10 KIAS, in order to maintain it manageable. Although I have hover the AS350 without a problem with hydraulics cut out for the purpose of training. The mess starts when you try to compensate every movement. Ok, so it is clear that without hydraulics you have a rough time at the controls, but you can control the helicopter. Now, in this simulation, you cannot control the helicopter. As a real world pilot, for me in this simulation, I would rather have a lag on the controls vs out of control! I my humble opinion it would be better simulated the lag, because in real life, its a bit about lag because you don't have the force to instantly manage the cyclic/rotor disk. But again, you have always control on the helicopter. I read someone saying that you are "simulate the un-simulateble", well, if you have FFB joystick it can be simulated if devs what to get a more deep level, for those who do not have FFB joystick, a simple lag in joystick vs in game cyclic would simulate best what it is lacking of hydraulics in real life. Meaning, as long as you are in 80~20 KIAS of range, you have control over the flight. When you pass the 80 KIAS mark, you will struggle a lot to maintain force on the cyclic, and you will end up not having resistance enough. Another problem is hovering because you have lag in your cyclic (you simply don't have the force to react quickly enough to changes) and that could be simulated with lag in controls. Please, for the devs, remove the cyclic wandering because it is not realistic at all and there is other manners of simulating it. Thank you. PS: For those with curiosity, in the AS365 N1, if I lose both hydraulic systems, I cannot control the helicopter, you lose all the control and it is impossible to move the cyclic or collective. Thank engineers for dual hyd system! :)
-
Ok. Thank you for the heads up, I missed that post. Hope everything is ok with Polychop-Simulations and its personnel. Kind regards,
-
Hi all, Question for devs, why is that when you lose hydraulic power in the cyclic control it starts to wander like crazy? As far as my real experience tells me, you will not receive this type of movement in real life, although without hydraulics the movement force will be factored a lot in the Huey. The only time I was flying without hydraulics was in the AS350 and I can assure you it is really stiff!!! You only have a brief accumulator force to bring the aircraft to safe speed, 80 KIAS or below, after that it will be brute force. But, I've never experience this kind of behavior in real life. What was the reason to implement that wandering cyclic? Kind regards.
-

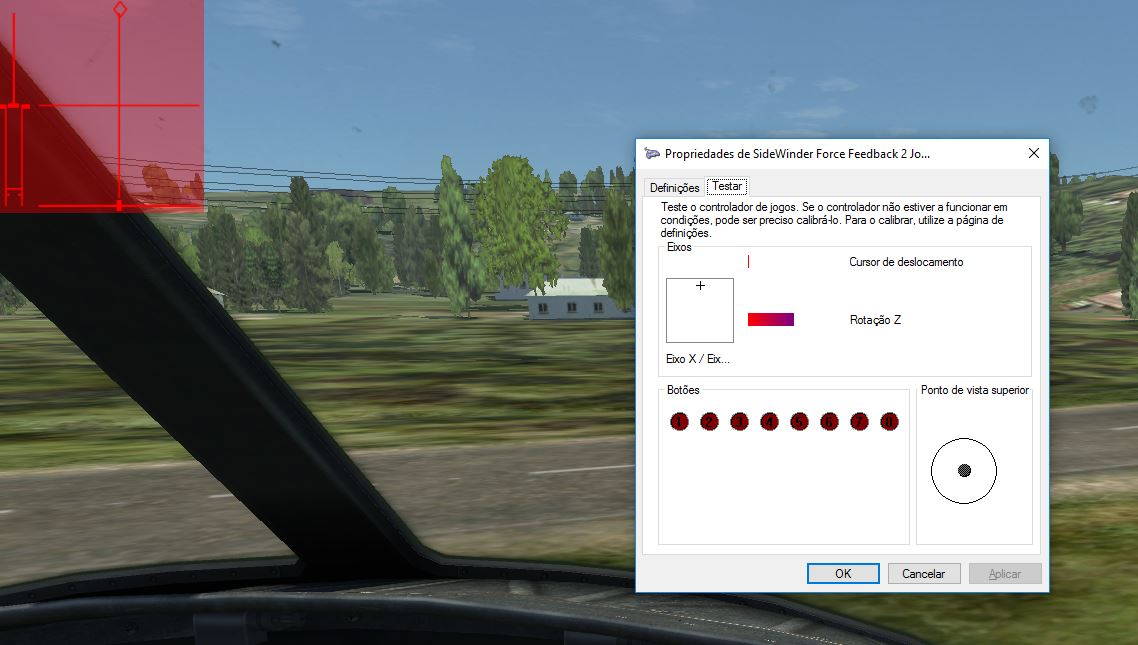
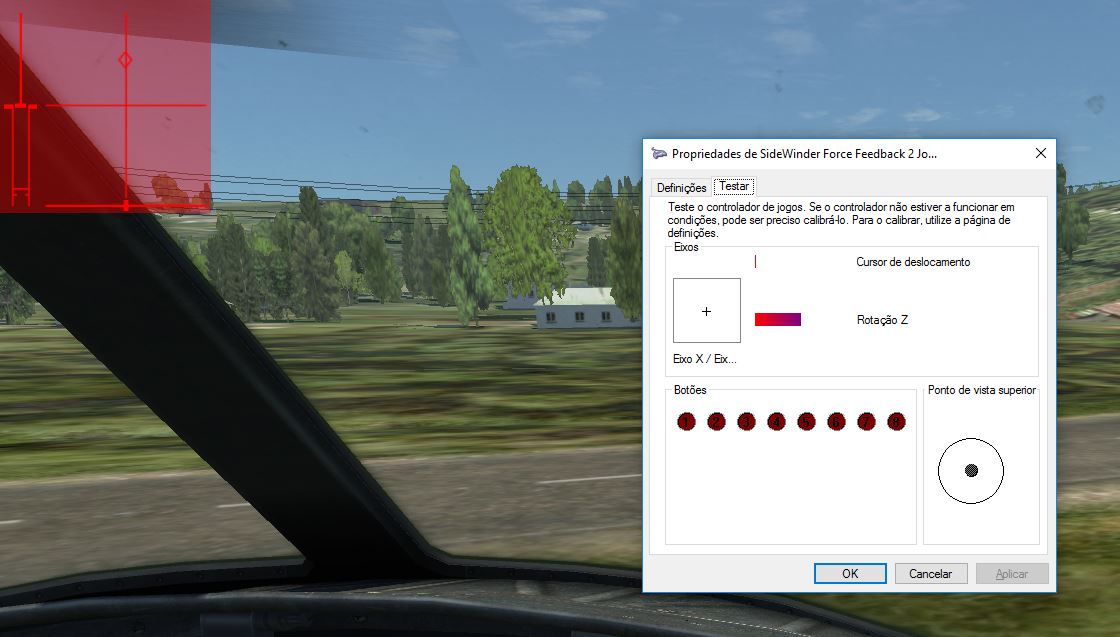
central position trimmer mode bug
Focha replied to decipher's topic in Controller Questions and Bugs
I have the same problem, which turns the module not flyable... Please see the pictures. There you have the center of hardware joystick and center of sim cyclic. Then full aft and forward. Regards.
-
Hi guys, I don't know if you remember this post: https://forums.eagle.ru/showthread.php?t=165929 Huge discussion about FM as you probably are all aware. So I haven't had anytime to fly in the simulator since that discussion. I've got a brand new PC and I've install DCS and tried you Gazelle. It is to my astonishment, that the Gazelle continues not to operate as a helicopter in hover and specially turns. I recall that I have a few hundred hours in real life helicopters, from Robinsons where I took my CPL to AS365 Dauphin. I really thought you guys could fix the problem and the behavior, but it's still present. And please, if there are pilots that validate your FM, please give them my contact because I would like to take a talk with those experts... When you turn in a helicopter, using artificial stabilization or not, the helicopter must "follow" the turn. Your FM of the Gazelle, if you turn, the nose simply stays there. That is not, let me say this again, that is not how it is suppose to behave. The helicopter should follow the turn. Meaning that it should be changing its heading thus it's yaw rate! Even without pedal into the turn! In your Gazelle, its like its necessary pedal input to make it turn into the roll. Also, it is not really noticeable the dynamics of hover, without stabilization! I don't know if I am expressing right or if you are understanding what I am trying to say here. Simply put, no helicopter flies like your Gazelle! I have real life experience in R22, R44, AS350, AS365 and Ka-32. None of those helicopters flies like your Gazelle. Although they fly a lot like the Huey and the Ka-50. The resemblance between the Ka-50 and Ka-32 in real life is amazing. The Huey is comparable to the AS365, although AS365 has less vibration. But speaking in flight dynamics, all those helicopters fly the same, meaning, you expect the same behavior with the obvious differences. But I am sorry to say this: Your Gazelle is not flying like a helicopter. I was really expecting that after so many time it would be corrected, but it's still the same. And I am not talking about stabilized flight. I hope you see this critic not as destructive, but constructive in the way that you will try to fix it. If you have the money, please take some helicopter hours or pay to an instructor and you will see what I am talking about. Thank you for your understanding. Kind regards and hope the best.
-
MS FF Sidewinder 2 Problem - Buzzing Noise
Focha replied to Focha's topic in PC Hardware and Related Software
Thank you for your reply mate. -
Any news on this? Resurrected this 1 year old topic. :O
-
Have a question. How is the Harrier operation during approach, transition and landing? Does anyone have numbers or procedures?
-
https://drive.google.com/file/d/0B7VYEhWAnBfbMnFib2UyUHZ6VDA/view
-
Hi all, I have a MS FF Sidewinder 2 for a long time now, probably 15 years. I know it is a lot of use, it was the time where they did things to last and not to profit. So... Lately I've been having this type of buzzing noise when the joystick is in some neutral position, does anyone have experience this problem? If so, did you manage to fix it? I never open my joystick, and it is working pretty well, but this sound is just annoying. Kind regards.
-
I thought I saw an option to set it like this: - New; - Used Clean; - Used Dirt; - Phase out. That would change the textures of the aircraft, accordingly. No?!
-
This is amazing news! Totally agree that F4 campaign is what you should strive for and we all know about DCS limitations.
-
One easy way of ending all the behaviour is to... Release only final version and keep closed betas! TA RA!!! :D
-
Yap, those are extremely thin rods. They have to support all the compression and extension from the actuators/swashplates and blade's aerodynamic forces. And yes, the main shaft as parts a bit long.
-
Really good news! Thank you.
-
Thank you for the heads up. Good to know that it was implemented. Sent from Tapatalk via Samsung Alpha.
-
I got it. Fly the aircraft, stabilize the attitude you what, press button, move stick to center, release button, fly the aircraft. It's good for non FFB joystick. Good work! Sent from Tapatalk via Samsung Alpha.
-
That is totally possible. I recall a maintenance fly test I've made to a AS365N1 that had the AFCS system broken (yaw command) and we had to test it by letting the anti torque pedals alone, and I recall I was around 80 to 100 knots and the AFCS just responded with almost full right pedal and it ended up like in your movie. Plus a lot of noise from the airflow and new pants!!! The only difference being the attitude of the aircraft, it wanted to roll left and nose down, I think, front what I recall. Cheers. Edit: Although the full rotation is almost impossible to do with forward velocity. The vertical fin is too big and creates a lot of yaw. You would pass the power limits (torque) in the Dauphin. Cheers.