Beamscanner
-
Posts
925 -
Joined
-
Last visited
-
Days Won
2
Content Type
Profiles
Forums
Events
Everything posted by Beamscanner
-
Got to love the responses haha! Heatblur did the best RWR simulation to date. But since were only comparing the F/A-18 and the F-15E, Im only focused on ED and Razbam. The ALR-67 threat ring logic is wrong in the F/A-18C. Razbam (and heatblur) implemented the correct threat ring logic into their ALR-67s. The rings should take threat and range into account, but EDs only takes threat type into account. Dont mis-quote me please. I didn't say "better avionics". I said more modern avionics. The F/A-18C generally has more modern avionics. The Hughes/Raytheon radar family history is as follows. APG-63 -> 65 -> 70 -> 73. Lessons learned + Computer processing growth means a more modern radar in the Hornet, even though the max detection range will still be better in the F-15 (larger antenna). ie more modern vs better performance. Generally, I mean all of the above better performance. Speed, altitude, range, endurance, loadout (bar maneuverability). MSI, more trackfile processing, more computational capacity, integrated Radar/RWR, fully digitized aircraft with all system BIT. Dont get me wrong, the F-15E is a beast, and JHMCS and 9X are very modern systems. I think the F-15E will outperform the F/A-18C in most activities. Though if DCS implemented the F/A-18s features properly, I think it'd have some pretty awesome features you don't see in the Strike Eagle. (mainly to do with MSI) I guess speaking in generalities is a no no here and will get the armchair experts into a frenzy.
-
IRL the F/A-18 has more modern avionics, and the F-15E generally has better performance overall. In DCS The Razbam DCS F-15E will likely be simulated much better than the DCS F/A-18C. The F-15E will have better: A/A Radar simulation (simulates range and doppler space) SAR simulation RWR simulation (example: AV-8 has better simulated ALR-67 than the F/A-18C) The DCS F/A-18C gets a lot of the nuanced details wrong (ex MSI logic, RWR logic, Radar GMT/MAP, TPOD targeting, etc.). I would go with the F-15E, personally.
- 314 replies
-
- 11
-

-
You can google an open source Canadian University Thesis that describes the APG-63 in vivid detail. (topic concerns its use on a CP-140 aircraft) In it HPRF is mentioned as not having any signal loss due to sidelobes (ie low altitude performance loss).. As its receiver only collects energy from doppler clear regions.
-
A little update. I've completed the majority of the Air radars. Though I don't know if there's any I'm missing. Below are some examples: This is an active missile tone (goes from MPRF search, to MPRF lock, to HPRF lock). I made it long enough for it to last longer than any reasonable terminal phase. (ie you shouldnt hear it loop) (Active Missile) MPRF Search - MPRF Lock - HPRF Lock (D).ogg F/A-18C search (F-18C)(AV-8) Search (D).ogg F/A-18C Lock (F-18C)(AV-8) Lock (D).ogg SU-27 Search (SU-27)(MIG-29)(J-11A) Search (D).ogg SU-27 Lock (SU-27)(MIG-29)(J-11A) Lock (D).ogg F-15 Search (F-15) Search (D).ogg F-15 Lock (F-15) Lock (D).ogg
-
(F-16) Lock (distorted_v2).ogg This is a custom made PRF tone of an STT lock by another F-16. I think I've got the distortion figured out pretty well.
-
Oh look, the APG-70 also made by Hughes/Raytheon, has a RBGM / GMT INTL mode with overlaid data, (both the map and GMT) rather than a sliding screen door of one set of data at a time. And ED wonders why the community doesn't think the DCS F/A-18C was done well.
-
no.. Nearly all HPRF waveforms dont perform range 'detection'. Range is too ambiguous to be detected. It can however be 'resolved' after targets are detected. A single "range bin" (otherwise described as having no range bins) is the norm for HPRF. Range is measured 'post detection' via freq modulated ranging (FMR) (except in VS) In radar engineering, "detection" "post-detection" "resolving" all have very specific meanings.
-
I've recently come across detailed information for the early APG-63 within an older radar book. The 1st edition of the 'Introduction to Airborne Radar' has a chapter in it that the later editions do not have. This book is written by the company that built the APG-63. Chapter 29 "A Representative Multimode Radar" details the early variant of the APG-63. It states the following: HPRF ~50% Duty Cycle (1 range bin) Had 512 Doppler Bins Receiver completely filtered out the doppler clutter region. It only processed the clutter free region. This means that in HPRF, the radar should never have a negative impact from sidelobes. MPRF 64 Range Bins and 16 Doppler Bins (1024 total bins) Though only 9 - 11 Doppler bins were used (576 - 704 total bins used) The extra doppler bins were created at no extra cost due to the FFT (ie a 16 point FFT is easier to execute than a 11 point DFT) Cycles through 9 PRFs Uses a 13:1 Phase code for pulse compression Allows for use of a longer pulse (high duty cycle = greater detection range) While maintaining good range resolution Other details mentioned The receiver has 2 channels. 1 Sum and 1 AUX In STT, the AUX channel performs monopulse tracking (delta of Az and El) In MPRF, and only in MPRF, it uses the guard antenna and performs sidelobe cancelation.
-

Upcoming Updates Video (19 Aug) on Spotlight Scan Radar Mode
Beamscanner replied to GrEaSeLiTeNiN's topic in DCS: F-16C Viper
No. This is a misconception many RL pilots have. The energy from two separate sweeps (seconds apart) is not combined (summed) in A/A radars. (Though many Surface Search radars do this. The technique is called "scan to scan integration") --- Back ground --- Some Pilots are told that they can detect targets at longer ranges if they use a smaller scan. The reasoning usually given is 'more energy on target'. While the outcome of this statement is true, the reasoning is not. As I stated previously, the 'increased detection range' is due to radar getting many more 'looks' at a target. You know how difficult and seemly weird it can be to get a good cellular signal connection when ur far from the tower. And how sometimes, for example, moving 1 foot to the right boosts your connection by 2 bars? What's happening is that the signal is bouncing all over the place (multipath), creating a complex web of standing waves. Now imagine both you and the tower are flying at 300 knots. bringing it back to the radar example, the pulse of light (RF is just lower freq of visible and infrared light) reflects off multiple point of the target. At some angles, the reflections will met each other again out of phase. Creating an RCS null. However, some moments later, as the geometries shift, the reflections may met together in phase, allowing for a strong radar return. --- When do pulses get to integrate --- Separate radar pulse do integrate in AA radar. Just not on the time scale of separate sweeps (at least in AA radar). Typical pulse integration occurs within the time it takes a single beam-width of the radar to cross a point target out in space. (this value is known as time on target or TOT, and is on the order of tens of milliseconds) If one were to integrate pulses/energy of a longer period, they'd inadvertently increase their beam width and dramatically reduce their angular resolution. --- Scan to Scan integration with surface search radars --- This technique is applied to a circular spinning naval radar with a fast scan speed. Pulses down a single bearing are saved and added to pulses down the same bearing on the next sweep. This is distinctly different from "pulse to pulse integration". The benefit surface search radars have in doing this has to do with ocean waves. If a radar does normal pulse to pulse integration, a given ocean wave wont move far enough between pulses to cancel out in phase (the wave doesnt move very far in ~10 msec). It thus adds constructively in the receiver. However, when using scan to scan integration, the wave has enough speed to move in and out of phase between sweeps of the radar (order of .5 - 3 sec) which allows for some deconstructive interference to occur with ocean wave returns. Thus, it helps reduce noise from the ocean, allowing a clearer display of boats and land. Though it does reduce angular resolution. -
Its very likely that SAM would trigger a lock warning in the enemy jet IMO. (SAM is simply a narrow search interleaved with a short STT every so often) (I think the STT duration lasts for more than 1 sec) In DCS no lock tone occurs when U SAM bug a target. But I think it should. At the end of the day, DCS is suggesting that the RWRs could not detect a STT / lock within a 1.5 sec timeframe. If there was absolute realism in this game, I think TWS would be more stealthy than SAM. Since TWS never STTs the target. [What is STT? STT is when the radar stop scanning and focuses all its energy onto the target. The targets RWR can identify an STT bc the emitter it sees goes from an intermittent tone that comes in and out every few seconds to a static/constant tone]
-
Upcoming Updates Video (19 Aug) on Spotlight Scan Radar Mode
Beamscanner replied to GrEaSeLiTeNiN's topic in DCS: F-16C Viper
IRL Spotlight is used to rapidly acquire a target when the direction or relative position of the target is known, but your radar is not currently detecting the target. ie via data link track or bogey dope call. IRL radar detection ranges are probabilistic (typical advertised detection range is based on a 50% detection probability). Thus, getting more sweeps across the target simply means that your radar gets to 'roll the dice' as it were, many more times in a given period. (its probabilistic bc targets RCS fluctuates rapidly in real time; due to reflection geometries and interference) DCS does not use probability in its radar detection ranges... Its 100% or 0%. Spotlight mode is not used to lock up a target that already has a trackfile on your scope. In that case it is useless. It's too bad that the video showing spotlight has them simply use it on a target the radar already sees.... smh -
It is quite refreshing seeing actual simulation, in a simulator. Looks great!
-
By APG-63, do you mean the AESA APG-63(v2) and (v3)... BC those are going to be way better than the APG-70
-
Anyone know if the HMD Radar acquisition oval is supposed to disappear once a lock is achieved? Currently the oval doesn't disappear, and I dont know if this is a bug or not.

-
investigating AIM-120 still can not chase simple Split S manuever.
Beamscanner replied to opps's topic in Weapon Bugs
Nearly all tracking radars switch to a single PRF during track. The PRF is adaptively switched when needed to prevent eclipsing the target in range or doppler. Using MPRF search (cycling through 8 PRFs) provides a SNR 1/8 of what you'd get from an adaptive PRF track (single PRF). And it reduces the target update rate. There's no comparison. Once you've found the target, and you don't care about finding other targets, adaptive track is the way to go. -
investigating AIM-120 still can not chase simple Split S manuever.
Beamscanner replied to opps's topic in Weapon Bugs
Using a single PRF is a huge benefit FYI... it means you get to increase the number of pulses integrated (increasing SNR) AND you get a higher update rate on your track (improving tracking algorithm). (normal MPRF search has to cycle through 7-8 PRFs to resolve all range and doppler regions of interest) It should comfort you to know that a lot of radars do this while tracking. As for everything else, its pure speculation. Sure, we can assume that the missile to programmed to 'coast' the track in memory. But it cant know a split S from a normal 90 degree notch. -
investigating AIM-120 still can not chase simple Split S manuever.
Beamscanner replied to opps's topic in Weapon Bugs
MPRF doesn't have clean range bins like LPRF. Range is ambiguous and is resolved with PRF switching and Chinese remainder theorem. Because range clutter is ambiguous, it gets superimposed over all the range bins. --------------- I know this says "MPRF", but the parameters say otherwise... (>.>) 10 usec PRI (100,000Hz PRF) and 30m range res. ------------------ ED is in the right here from what I see. (Though they need to fix a lot of other radar aspects. For instance) The only way the AIM-120 could re-acquire / track the target through a look-down and doppler notch would be with a LPRF mode precisely for this purpose. Who knows if its actually capable of this. MPRF would likely succeed in tracking the target if the target went into the notch in a 'look-up' condition. I'm sure target RCS does come into play, along with radar beam width and sidelobes. But I wouldn't trust any 'back of the envelope' math to determine the SNR required. A simulation of this would be necessary IMO. What about dogfights? With a Fighter radar in "MPRF", the Main Beam is much tighter, and has reduced sidelobes because it can afford to taper the antenna. This means the SNR would be much better than with the AIM-120's radar. Also, a fighter radar may have the capability to lower the PRF into the "LPRF" regime during a lock. There's room to argue that a fighter radar could have decent performance in tracking through a look-down + notch. At least at close range. Remember guys: HPRF filters out clutter via doppler. LPRF filters out clutter via range. MPRF cannot filter out range or doppler clutter. But if the target 'pops out' above the clutter in either range or doppler, MPRF will pick it up. Hence its use in 'all aspect' detection and ACM. -
Video evidence from VFA-105. Watch the movement of the RWR track - "2" while the pilot makes a right hand bank (9:14-9:20) VFA-105 did not transition to the Super Hornet until 2006. So this is likely the ALR-67(v2), and is not the ALR-67(v3).
-
correct as is The MIDS symbols appear not "on" the A/C
Beamscanner replied to nickos86's topic in Bugs and Problems
I imagine that the accuracy would be dependent on the source and number of sources. A friendly networked in Link would likely be very accurate as its INS is providing a very accurate position at a high update rate. A target from a donor would only be as accurate as the APG-73, and would likely be updated via trackfile extrapolation more often than a real position update (radar scan rate) A target from the AWACS (surveillance target) would only have its position refined once every 10 seconds (scan of the AWACS radar), with all other updates being extrapolations. Additionally, MSI fuses all of these sources together if multiple radars are tracking the target. So, I believe a friendly should have its position be very close to accurate since its true position is constantly provided into the network. Non-cooperative targets would likely be less accurate. -
This is correct, and not old logic. The problem is that you can see multiple aircraft flying near each other (in range/velocity/angle) in the first place in RWS/TWS/STT. The whole point of RAID is to breakout aircraft that may have combined into the same range/doppler bin. ex I know y'all have seen Top Gun before. Remember when the ships radar sees two contacts, and as they got closer, it 'turned into 4 contacts'. Those pairs of aircraft combined on the radar screen because they were so close. as they got closer the enemy jets could of been broken up into separate contacts by What SHOULD happen is that the contacts should of appeared as one target in your radar. (again assuming they were in roughly the same range and closing velocity) The pilot would sanitize the target by performing a RAID on the 'single' target. This forces the radar to slow down and process a lot more data to figure out if that target is truly one target or if multiple targets exist. So yes, one L&S should exist in RWS/TWS/STT. In RAID, it looks at that 'one L&S' and determines if its actually multiple jets. DCS does not simulate target combining and treats RAID like an expand (zoom in) option. (its not) Target combining would also increase the 'combined targets' RCS. ie if you could detect a Su-27 at 50nmi. two Su-27s flying in close formation (same range/doppler bins) would be detected well in excess of 50nmi. This is because both of their reflections would sum in the same range/doppler bin. Also, the combined RCS would be greater than the sum of their parts, because of multipath between the two (or more) aircraft. ie two 5msq targets would likely have a single RCS in excess of 12msq. The real bug is here:
-
That's very interesting. Radar coasting part makes sense. Edge trackers were common with late era analog tracking radars. My gut instinct is that a digital receiver wouldn't sample at a high enough rate to perform edge tracking (I could be wrong). I'm curious if the RDI had a hybrid receiver. As I doubt the ADCs of that era had enough resolution and dynamic range to accomplish edge tracking. Obviously it would use range gating, which would follow the leading range bin, but that's not the same as edge tracking.
-
All the books I have indicate that Chaff becomes mostly ineffective once it decelerates below the radars velocity gate (assuming a True Pulse Doppler radar). Chaff can be effective against PD when maneuvering as it can momentarily confuse tracking algorithms. And obviously it helps when flying in a doppler notch. I feel like Fri13 is confusing MTI with True Pulse Doppler. MTI can only tell if something is moving, and cannot selectively filter doppler. Thus, MTI is still very susceptible to chaff. Even modern coherent MTI, such as early warning radars and anything using a Low PRF. This is why the west have explicitly distinguished MTI from Pulse Doppler. While the USSR tried to conflate the two, because they didn't want to appear too far behind the west.
-
Obviously they cant just trust some dude on the internet. Nor would I want them to make changes because some dude on the internet said something. That being said, I think the real solution is that ED needs to hire an expert in Radar/EW simulation. I get the feeling that this blanket rule stems from a singular radar they may have data on. For instance, the Slot back radar was a very oddly thrown together with a mix of analog/digital components. Its possible that it specifically had tracking problems. But this is not a blanket rule I would apply.
- 44 replies
-
- 15
-
-
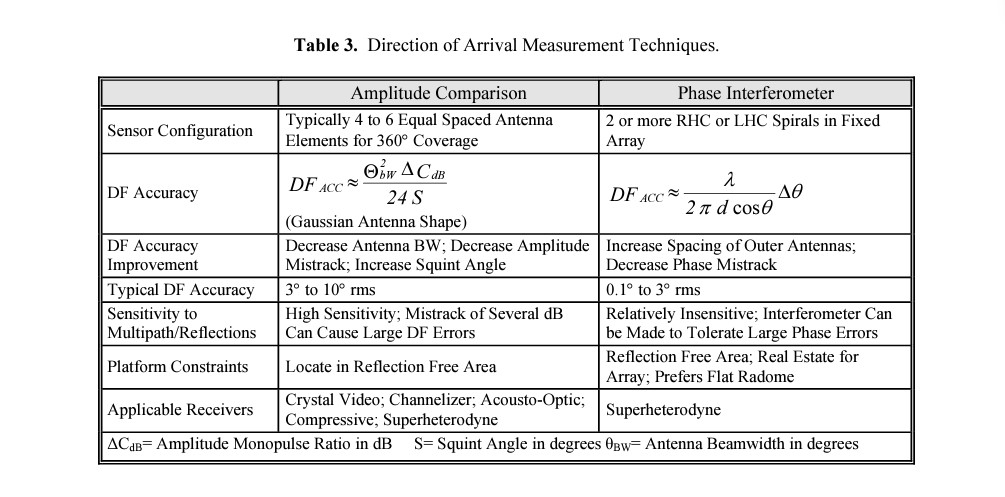
Thats a generalized accuracy thrown around, not one I calculated. The actual formula is in the picture i posted.
-
of course: Electronic Warfare and Radar System Handbook 5-3.3 "DISTRIBUTION STATEMENT: Approved for public release." ~10 degrees rms accuracy for a 4x antenna configuration