Hobel
-
Posts
2654 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by Hobel
-
 Yes, I have encountered something similar before, very unpleasant. I'll check again, maybe that's exactly what it is. EDIT: something like the example? TGP JUMP .trk
Yes, I have encountered something similar before, very unpleasant. I'll check again, maybe that's exactly what it is. EDIT: something like the example? TGP JUMP .trk -
Would you upload tacview or tracks from the tests?
-
reported The SOI goes to the WPN maverick without having to do it
Hobel replied to Silver_'s topic in Bugs and Problems
I have deliberately not opened the wpn page to demonstrate this. If that doesn't change soi. Is it then basically correct? -
reported The SOI goes to the WPN maverick without having to do it
Hobel replied to Silver_'s topic in Bugs and Problems
in principle, but only if the FCR goes into the tracking state, in his example he is not yet in the tracking state only with the 2 TMS UP he would be in the tracking state and thus SOI to WPN page ah understand like this? : https://streamable.com/3o0pbj -
[2.9.7.59263] [MT] AGM-45 Shrike tracks targets inconsistently
Hobel replied to DSplayer's topic in Weapon Bugs
but that's how it is in dcs. Did you get this from an lua? Because it feels more like 3° or max. 15°. I'll test it again ingame. I am curious what the correct value is -
[2.9.7.59263] [MT] AGM-45 Shrike tracks targets inconsistently
Hobel replied to DSplayer's topic in Weapon Bugs
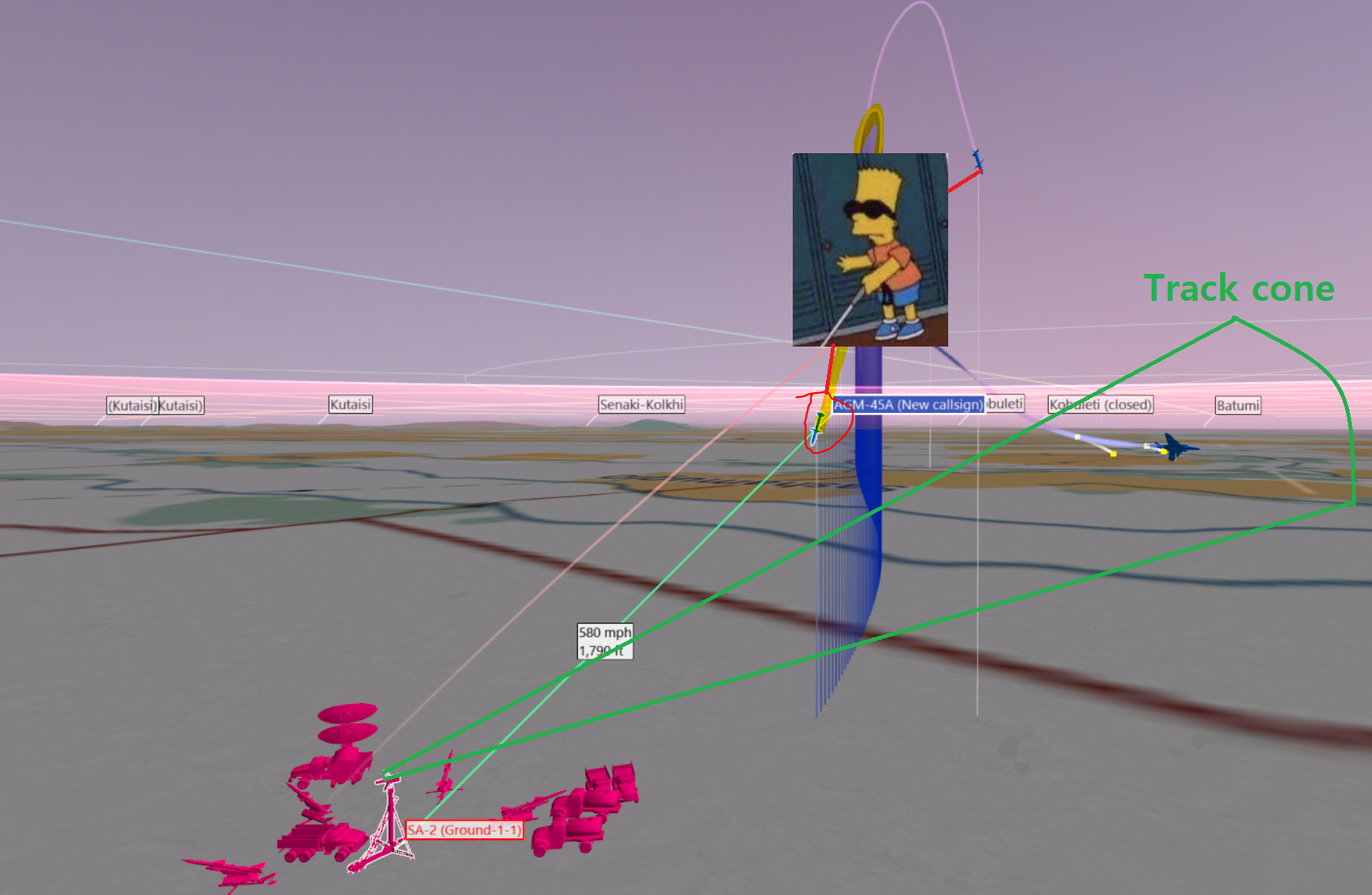
I have checked again, you are right then I must have made a mistake before. Maybe Same Like here? If the Shrike-45 is not in the sa2 track cone, the missile is blind.
-
looks good
-
reported The SOI goes to the WPN maverick without having to do it
Hobel replied to Silver_'s topic in Bugs and Problems
which Maverick, otherwise set the TGP from MAN to AUTO I saw your track and hmm. if you only want to leave SP then TMS Down should be enough otherwise it means for our version basically, if FCR GM is SOI and you press TMS UP>> FCR GM tracking state = the SOI changes to WPN/MAVERICK. However, your FCR is not in tracking state after TMS UP, but the SOI still changes. -
Huh? so spotting is pretty solid for my system. 3440/1440. I can't complain too much. Before the big change it was terrible for me too.
-
[2.9.7.59263] [MT] AGM-45 Shrike tracks targets inconsistently
Hobel replied to DSplayer's topic in Weapon Bugs
MK22 goes to the search radar which is on continuously. with the others the track radar is only seen by the seeker when it is on, maybe there is a difference between search and tracking radar and search radar gives a sound and tracking does not? -
[2.9.7.59263] [MT] AGM-45 Shrike tracks targets inconsistently
Hobel replied to DSplayer's topic in Weapon Bugs
One question is the sound when the Sa-2 tracks you? I will have a look at everything later -
below 4500 feet and active pause was not on both can be seen in the video ah you reacted to another video and also here I have said a few times why this happens 100feet or even 30m is not much at all - this is what it looks like for the IR seeker at 8nm 3 targets are in the tracking gate so it is not surprising that the wrong one may be locked and i need a second attempt in this case, even if there was no active pause in the example, that would still be okay. and I have now said several times why this is the case, if there are several targets in the tracking gate, it is almost random which target you lock. That's why I also need several attempts, which is completely normal. targets that are close to each other are a problem for the Maverick seeker, especially if they overlap Irl the Maverick would have even more problems with targets that are so close together. here, as can be seen in the video, all targets are in the gate, how is the seeker supposed to know which one to lock if there are 3 or more IR signatures in the gate? If you have a problem with the Maverick in a certain situation then upload a track and we can talk about it. because so far you have not posted a single track of the problem so that we can see your view... Track? i don't have the problem and for the other things you can create bug reports and attach a track if something doesn't work, we don't have to discuss it here
-
Do bullet holes in AI planes affect the flight model?
Hobel replied to bephanten's topic in Western Europe 1944-1945
With the Bf109 the effect is very strong with the p51 it seems to go towards 0 but I have to test it again -
This is possible and works very well, it also works with buildings but here the ground is hit. With the bunker mentioned here, you hit also roof with this method I looked at the track and the mistake here is, you stop lasing and then you throw the bomb, the bomb misses. I would expect the last position of the laser to be saved and not immediately thrown overboard as soon as you stop lasing. test it again just hold the laser down when dropping here you can see that the laser coordinates are discarded after a few seconds: 2024-08-19_13-58-01.mp4
-
how to reach 370mph (~595km/h) with the K4 I have just reached around 361mph(580km/h)
-
To be fair the shots are nose down and over 500m alt. In the Ed Newsletter it says to the other missile, below 500m alt and the missile makes a loft. In these pictures you can see su25 lvl Flight And below 500m And the kh-25 seems to initiate a loft. EDIT: okay i tested something else, in DCS the missle also makes a loft but only when it tracks the laser. with the DCS Su25, the missle drops after the start and only when the Missile sees the laser does the loft occur, but the ILR pictures show that the missle even initiates a loft from the rail The Seeker has a range of 8km but even within this range the KH25 only goes into the loft after flying ~300m
-
okay, but that's exactly what an “Emergency” is
-
Yep For testing purposes, I have locked vikher Missile in ACM mode
-
could you upload a track?
-
But the differences are not big and most of them are optimizations. And if the MLUs and the like point to this and there are still no documents that speak for or against it. so this is not a big deal here but if HSD is SOI and the radar Cursor disappears it would be a purely declutter measure.
-
Which weapons did you test this with?
-
Transfer steerpoints from the F10 map into the aircraft - DCS: The Way
Hobel replied to Comrade Doge's topic in DCS Modding
um the whole thing is basically self-explanatory -
what you are describing should also lead to problems with the real Maverick, I have now shown several times to what extent tracking works in certain aspects in DCS and everything stands and falls with the >>tracking gate<< if there are several targets in this, which tends to happen at long distances, problems arise. This is likely to be even more dramatic irl than in DCS. I even took the situation of a user here and showed him that it works using his own mission Such situations are quite rare and if you avoid firing like this, what I am showing here would be much more difficult irl.
-
Transfer steerpoints from the F10 map into the aircraft - DCS: The Way
Hobel replied to Comrade Doge's topic in DCS Modding
if you haven't noticed DCS now has an inbuilt "theway" of course not as extensive as the way but you can create and save waypoints now -
Here is a small hint. HSD is SOI no radar Cursor visible, but as soon as the SOI changes the radar Cursor jumps back into the picture