Frederf
-
Posts
7593 -
Joined
-
Last visited
-
Days Won
3
Content Type
Profiles
Forums
Events
Everything posted by Frederf
-
Example track which should show "F" as the slant range sensor source (AG, CCRP, FCR GM primary sensor). F16 Slant Range F.trk
-
CZ, not FZ
-

Thrustmaster Cougar looses connection Win10
Frederf replied to Reusenfisch's topic in Controller Questions and Bugs
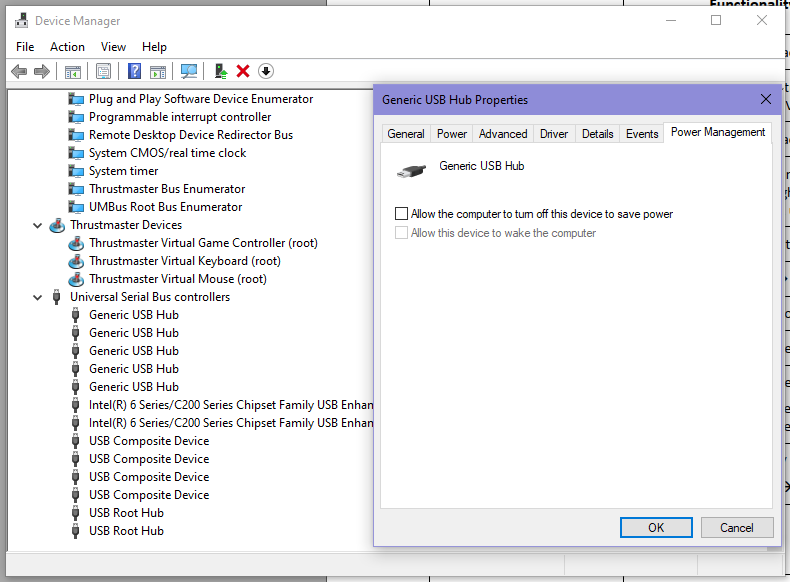
TARGET is able to program any selection of supported devices which I believe includes the Cougar throttle. It might depend on how it's connected. I would recommend getting a powered USB hub. The Warthog throttle uses quite a bit of power, more than the Warthog joystick possibly due to its lights. A passive USB hub often doesn't supply enough electricity. Also, USB power saving should be disabled to ensure the USB port doesn't go into low power mode:
-
DMS down will bounce SOI between the two MFDs if both are selectable. The first DMS down chooses the priority format depending on what you're doing. Sometimes SOI is restricted to a particular display or in some cases there is no SOI allowed at all. When HUD is SOI an * will show on the left side.
-
I'm not sure if our TGP is supposed to have the NV pointer or not. In some TGP the PTR option is selected on OSB2 which is where we have the AUTO/MAN option currently. In this later TGP 2x TMS right is the hands on shortcut to cycle through the three options: designator -> pointer -> both. Also in this later TGP the TMS left x2 cycles between IR and TV for TGP. TMS left x1 is for cycling between IR BHOT and IR WHOT. In DCS the cycle is a simple IR B -> IR W -> TV without the double tap. The TGP is capable of producing up to three laser wavelengths: 1.54 micrometer training designator, 1.06 micrometer combat designator, and ~900 nanometer NV pointer. The training/combat designator are for weapon or LSS designations and are invisible when viewed through NVGs. The training wavelength is eye safe at a closer range and is used with special practice LGB rounds. The training/combat selection is cycled on the laser DED page. The NV pointer works regardless of the laser arm switch and produces alone or simultaneously with the designator laser a visible laser beam when viewed through NVGs. It's good for pointing things out to others at night.
-
It might be related to the above double-movement. That should only apply in FZ though. Another thing might be that you're not CZ'ing after selecting the new markpoint. This would cause initial cursor placement to be mark point plus previous slews. Here's a track of an FCR GM mark involving slews. You see that when I select STPT 26 the cursor jumps away due to my existing slews. When I press CZ the cursor returns to the location that I marked. F16 FCR mark and CZ.trk
-
reported earlier Cannot undesignate TGP from SPI
Frederf replied to Topper81's topic in Bugs and Problems
I believe there is a bug where if HAD locks an object and the object disappears it's not able to be unlocked. Notwithstanding simply making TGP SOI should break any and all other tracking sensors and make TGP the SPI-providing sensor immediately. I had a look at your track. It's not just TGP that's stuck. Any attempt to move SPI is impossible. HAD seems to be acting as SPI generator during attack (not sure if that's accurate) and not giving up SPI control as it should (definitely wrong). -
The input signal to response is part of the FLCS code itself internal to the airplane. The idea is that because the SSC is a force transducer sensor some breakout force before anything happens makes sense. Otherwise the lightest touch on the stick (or any miscalibration or signal noise) would be providing input further down the logical path. ED is faithfully recreating the FLCS laws of the real airplane. However almost none of us customers have physical controller hardware that mimics the genuine SSC in this way. Most have displacement (not force) as the driver of the signal which comes with its own mechanical breakout force requirement plus we always have the option to add additional deadzone in options. I agree that viewed holistically the ability to alter the FLCS laws to remove this breakout part of the response function and replace it with any amount of deadzone would more faithfully recreate the control experience. In the absence of a first party modification it's theoretically possible to create your "negative deadzone" with the appropriate joystick programming software. I don't know if TARGET has the fine control needed but a custom curve where 0=0 and the smallest deflection resulted in a large jump in output (to the FLCS breakout threshold) would effectively erase the breakout part of the FLCS response.
-
Can't look at it because I don't own Syria. Can you describe it or recreate it with an included terrain?
-
It has worked for the past three years and it works right now. There's nothing to fix. Set the moveable pipper to -1.5° manually or use the -1.5° X mark on the fixed reticle as your radar boresight reference.
-
I do find the nose wheel pivots according to steering and reversal is not instant. Keeping rolling, avoid sharp turns, and allow some room for reversal. It can get scary with the deck edge near and the caster a mind of its own.
-
Keep a point nearby. If your FPAS point is off the coast of Africa (0°N 0°E) that's quite a distance.
-
I attempted to takeoff according to MiG-21bis Pilot Flight Operating Instruction, Day Circuit Flying, Concrete-Runway Takeoff without much success. ISA atmosphere, no wind, no stores, 50% fuel (7500kg) as assumed to day circuit flying training. Expected Engine stabilized at takeoff power setting before brakes release Upon 150-200 km/h control stick back 75%. Upon 250-270 km/h nose wheel unstick. Rotate to takeoff attitude: base of pitot at horizon, UUA-1 11-13°. Upon 340-360 km/h main wheels unstick. Retain liftoff pitch angle without airplane tendency to balloon or stall Retract landing gear at 10-15m height Retraction of flaps below 100m involves a controllable nose down moment No significant difference is expected with ventral tank, and up to two missiles or two UB-16 pods Unstick speed and takeoff length increases with heavier loads Manual Chart 8500kg, 11°, 760mmHg, 0m/s = 340 km/h unstick (320 km/h at +2° UUA) 8500kg 345 km/h unstick, 725m run, 900m rwy req., +10-15% reheat, +20-25% full throttle Actual Full throttle take off is impossible without grossly exceeding safe pitch Nose wheel unstick at 290 km/h lightweight (7500kg), 305 km/h medium weight (9300kg), 308 km/h heavy weight (10400kg) If pitch of 4-5° is used, UUA-1 is 11-13° and base of pitot at point of vane attachment is level with horizon If pitch of 7-8° is used, UUA-1 is >15° and base of pitot support boom at attachment to fuselage is level with horizon 8500kg passing 834m is only going 257km/h in full reheat. The idea of unsticking with full throttle takeoff at 11° UUA-1 within 906m run as predicted is unthinkable. With lightweight (7500kg) config the following are unstick distances and speeds at full reheat for nose wheel, main wheel with 5 degree technique, and 8 degree technique respectively. NWU 992m @ 290 MWU-5 1850m @ 374 MWU-8 2080m @ 378 === Acceleration of airplane during takeoff roll is insufficient to meet documented performance. UUA-1 produces too high of a reading at takeoff attitude or takeoff attitude does not produce a takeoff Takeoff run distances in some configs are approximately 200% of their charted values
- 3 replies
-
- 13
-

-

-
https://apps.dtic.mil/sti/citations/ADA044697 https://apps.dtic.mil/sti/citations/ADA044698
-
Did you merge the old and new folders together?
-
Above that speed FPAS gives up because you're clearly not trying for fuel economy. You'd just be getting alerts all the time and maybe the prediction isn't that accurate beyond a certain speed. I don't know why it prevents you from changing the reference point as a design decision though. Lot 20 is pretty old. Computational resources could be pretty limited.
-
Issue - L-39 Airspeed in Knots when avionics language set to english.
Frederf replied to v81's topic in DCS: L-39 Albatros
Yes it's 300 meters from Ka-50 (before DCS World) or possibly Flaming Cliffs. Makes sense that a helicopter being cleared to such a small height. -
Look in: \Mods\aircraft\F-16C\Missions\Training\lessons.lua That determines the order items are listed in the UI. File 2-6 is lesson 1-5 File 6-9 is lesson 11-14 File 10-16 is lesson 17-23 File 25 is lesson 25 Lots of gaps.
-
cannot reproduce Targeting Pod not pointing at steerpoint
Frederf replied to Kingfish_'s topic in DCS: F-16C Viper
AGL has a minimum value that is above the surface. MSL's minimum value is at the surface. They are different behaviors but I doubt it's a bug. The MSL floor used to be the same as the AGL floor many patches ago but it changed. Probably this happened because the waypoints of sophisticated airplanes were taking their vertical position from the waypoint Y values and this was a big annoyance when trying to attack said points. I don't see why the AGL floor value isn't 0 as well. I suppose it's to prevent setting very low AGL flight plans and opening bug reports when the AI wouldn't fly that low properly. -
Rockeye doesn't have any electronic interface. It's just a metal lanyard (or two). Nothing on the weapon accepts the voltages of the FFCS.
-
It's possible to get the FPAS point stuck if you do something to disable the waypoint being used. Not being a valid point you never get the arrows to change the selection.
-
The order of missions listed depends on the contents of a file. The filenames don't matter. Probably the numerical order reflects an earier plan. Some may depend on features not yet modeled or some dropped or rearranged. I wouldn't put to much importance on the particular order DCS presents. They aren't necessarily an optimal order or represent a complete education.
-
cannot reproduce Targeting Pod not pointing at steerpoint
Frederf replied to Kingfish_'s topic in DCS: F-16C Viper
Setting 0 ASL (or any below surface value) in the editor causes the surface elevation to populate the altitude field of the point instead which is then applied directly to the airplane on initialization. -
CBU-97s have wrong aiming and have for like a month.
-
Imagine the pipper is dragged at the end of a stretchy rope. Movement of the held end needs time to filter down to the solution end. Settling time is usually a few TOFs. Nothing ever settles perfectly but it approaches asymptotically. After a few time constants it's near exact. Maintaining pipper on target for 2-3s with relatively constant parameters must collapse to solution so much as the sight is designed to reproduce ballistics accurately at all.