All Activity
- Past hour
-
По идее да. Как у других должен 3D наколенник листаться теми-же кнопками, что и наколенник, открытый в окне. С полетной картой как быть только, непонятно. И пилота Вайпера она прямо на ноге здоровенная.
-
.thumb.jpeg.b9a38a8127c434fd6eba974eb2776d00.jpeg) Indeed. In jets the pilot and back seater(if the jet had it) would always start the jets. And go through the checklist. What ground crew would do is start the jet now and then to align INS etc. Hence fast alignment/stored alignment being the standard start up procedure. But during WW2 things were different. While of course the pilot knew perfectly well how to start their fighter. The ground crew would usually start the aircraft some 15 minutes before take off. This was to warm up the engine and let the pilots get their coffee and food in them. The pilot would jump in. Do some last minute checks. The crew would top off the fuel and off the pilot went. (This specifically deals with Western allied airforces on plan missions. There would of course be variations depending on nation, aircraft and mission type.)
Indeed. In jets the pilot and back seater(if the jet had it) would always start the jets. And go through the checklist. What ground crew would do is start the jet now and then to align INS etc. Hence fast alignment/stored alignment being the standard start up procedure. But during WW2 things were different. While of course the pilot knew perfectly well how to start their fighter. The ground crew would usually start the aircraft some 15 minutes before take off. This was to warm up the engine and let the pilots get their coffee and food in them. The pilot would jump in. Do some last minute checks. The crew would top off the fuel and off the pilot went. (This specifically deals with Western allied airforces on plan missions. There would of course be variations depending on nation, aircraft and mission type.) -
Weather mod v2.0 for DCS
YSIAD_RIP replied to bandit648's topic in Utility/Program Mods for DCS World
DCS: Digital Cloud Simulator Great mod! -
 Creepergamingboy joined the community
Creepergamingboy joined the community -
 asdfg1111 changed their profile photo
asdfg1111 changed their profile photo -
 Works fine for me. Sent from my SM-A536B using Tapatalk
Works fine for me. Sent from my SM-A536B using Tapatalk -

LockOn Greece and JATF v-Iniochos 2025
=GR= Cypher replied to =GR= Cypher's topic in Tournaments & Events
Greetings everybody. Participations are now open at JATF server. Day 1 will go live in October 20th 1900 UTC.
-
Hello, I'm having difficulty training with this bird. I'm trying things that may seem simple and basic to you: loops, looping, split S, etc. Perhaps someone who's used to posting YouTube videos will have the time to make one to train on the subject. (It's not just the inputs that pose problems, but also the choice of trim, the use or not of afterburner, as well as the correct AoA choices.) Thanks in advance, just in case. Sincerely, Michael
-
ohhh fabuleuse nouvelle merci beaucoup pour cette correction, alors quel été l'origine du problème au final ? @ERIC
-
HUD, HAD, HARM WPN page cursors
theonetruejason replied to Northstar98's topic in Controller Questions and Bugs
Yup I agree, it's not fixed and the thread should not be marked as such. The fix line in the changelog doesn't even read like that was the bug they were targeting. -
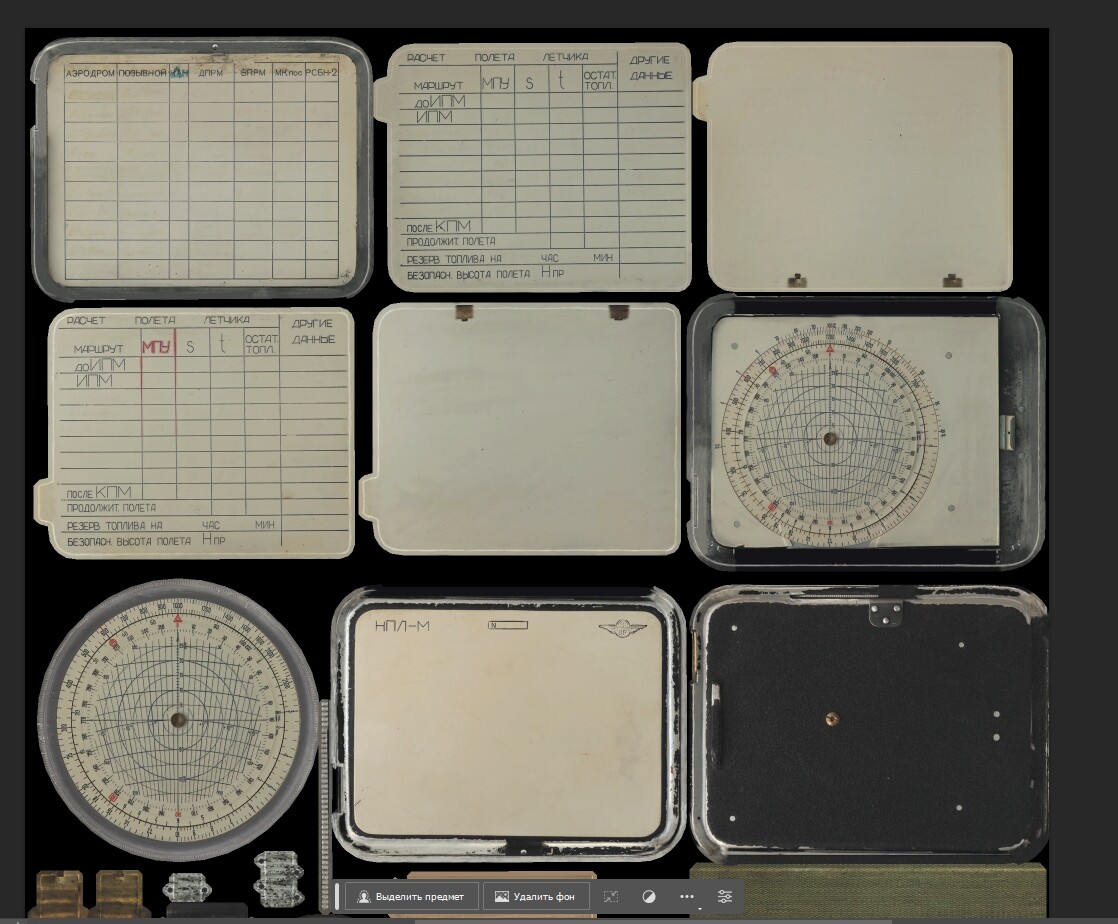
Заметил интересную "пасхалку") В текстурах кабины у наколенного планшета несколько разных страниц и две НРК(или как их правильно....). Сейчас вроде с планшетом ничего сделать нельзя. Возможно позже можно будет страницы перелистывать?
-
РЛЭ открывать пробовали?)
-
Because most users are flying SP and not MP? First iteration I'm sure. I have no clue to how long you have been lurking on these forums, but if you haven't been around for the past "few" years, I can see why you don't know. According to ED they are working on a totally new AI ATC system. And I believe them, because they asked for people with experience with professional Military ATC for voice overs. They are also working on a better flight model for AI called GFM, which they have shown videos of, even if that have been years ago. Exactly this. I was also disappointed when I first learned it would only be for SP and Caucasus, while it makes perfect sense. Make it work on the Caucasus first, because everyone has that map. I will look at it as a proof of concept, before it will be enabled for other maps and MP. Cheers!
-
I cant make big airplanes take off on nevatin because when they taxi from the south ramp to the runway 26R they taxi thru one of the f35 hangar complexes and hit the wings
-

Military Assets for DCS by Currenthill
currenthill replied to currenthill's topic in Static/AI Mods for DCS World
Thanks! I'll return with a complete list of the assets when I get closer to release, but this is the preliminary list: 2S1 SPG 2S3 SPG 9K35 Strela-10 SAM ASU-85 SPG BMD-2 IFV BMP-1 IFV BMP-1P IFV BTR-50PK APC MT-LB APC PT-76B LT T-72A MBT T-72B MBT ZSU-23-4 SPAAG Thank you! These will be included in my Russian mod pack. These will be included in my Russian mod pack. -
Can we get English cockpit with metric number?
-
Military Assets for DCS by Currenthill
gorandcs replied to currenthill's topic in Static/AI Mods for DCS World
This is amaziiiing! -
Barthek's CAUCASUS REDONE 2022
YSIAD_RIP replied to Barthek's topic in Texture/Map Mods for DCS World
This is probably the Reshade preset. Provided from an earlier post. Cheers -
Both sides support their statements with real MiG-29 pilots experience. Dead end. But it's interesting who are ED's SMEs: from what timeline and countries. Could they relate to the new Soviet aircraft or decades old and secondhand?..
-
-
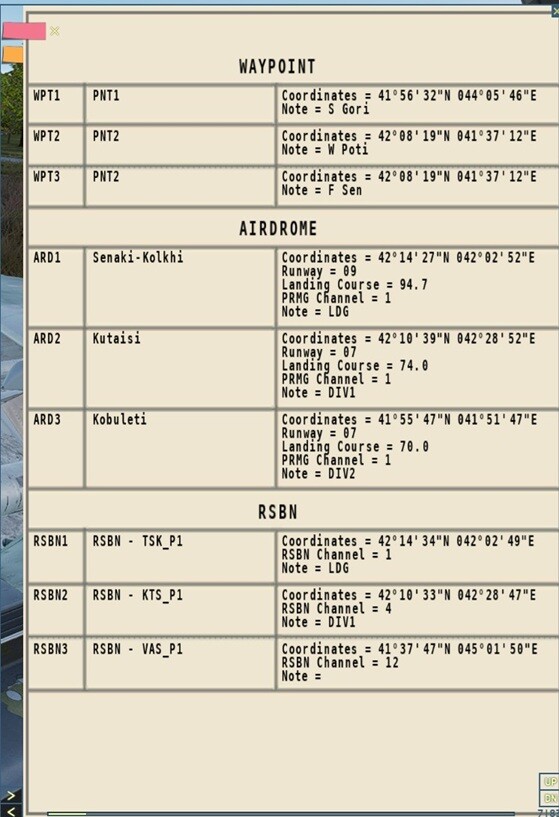
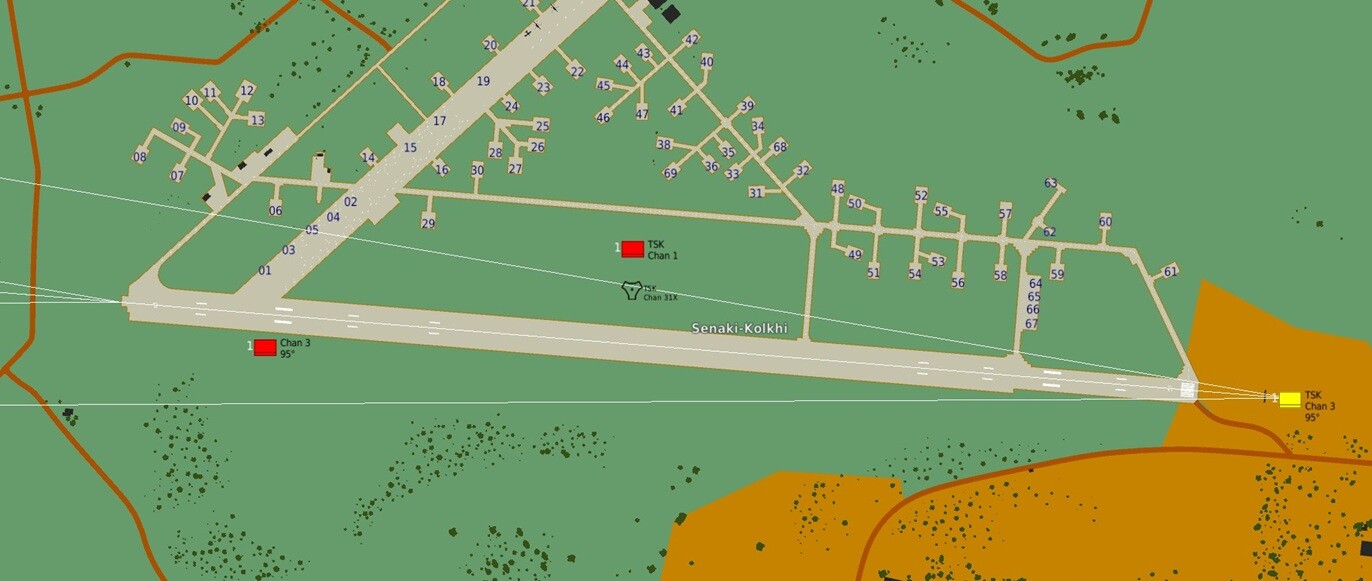
Hello guys! I noticed the PRMG channel indicated on the kneeboard for all runways I've selected in the mission editor is wrong(always indicates Ch1) . For the RSBN it's ok, see pics for Senaki
-
Этот режим никогда не использовали. Думаю что бомба могла улететь за пределы полигона )). Некоторые вещи на самолете были явно сырыми, такими они и стались , когда самолетом перестали заниматься.
-

Military Assets for DCS by Currenthill
Kappa-06MHR replied to currenthill's topic in Static/AI Mods for DCS World
Is the updated unit of dcs will be integrated to DCS ? -
Currenthill also made Shahed 136 for Iran (AI) Iran and Bayraktar for Turkey (AI) Turkey Good luck!
-
Это твои фатазии ? МРК при выпущенных закрылках не работает не на 9-12 , не на 9-13 и нет РЛЭ 9-13 . Модификации указываются в сносках и дополнениях .
-
Military Assets for DCS by Currenthill
MAXsenna replied to currenthill's topic in Static/AI Mods for DCS World
For now I guess. [emoji6] Sent from my SM-A536B using Tapatalk -

Military Assets for DCS by Currenthill
Esac_mirmidon replied to currenthill's topic in Static/AI Mods for DCS World
Those are apart from the Core models as i understand?