VampireNZ
-
Posts
1924 -
Joined
-
Last visited
-
Days Won
2
Content Type
Profiles
Forums
Events
Everything posted by VampireNZ
-
 Which # steerpoint are you trying to enter it as? I had the same problem as I was trying to add it as a SP in the 20's...can only add in number range 1-20. Steerpoint sequencing can only be changed in the SP range of 1-20. so it won't cycle over to MAN/AUTO for any other SP #. See the latest manual Pg 201 para 6. It's not that the program specifically needs MAN/AUTO....but by being in a higher SP # it skips over an extra SEQ dobber as it can't get there so skips the first set of N co-ords instead. I am actually having a problem with the keybind I use to Save a SP is registering multiple times so saving 2-4 of them. Tried increasing the Delay, even in the Config.json but no luck so far. Awesome little program thou, exactly what I have been looking for!
Which # steerpoint are you trying to enter it as? I had the same problem as I was trying to add it as a SP in the 20's...can only add in number range 1-20. Steerpoint sequencing can only be changed in the SP range of 1-20. so it won't cycle over to MAN/AUTO for any other SP #. See the latest manual Pg 201 para 6. It's not that the program specifically needs MAN/AUTO....but by being in a higher SP # it skips over an extra SEQ dobber as it can't get there so skips the first set of N co-ords instead. I am actually having a problem with the keybind I use to Save a SP is registering multiple times so saving 2-4 of them. Tried increasing the Delay, even in the Config.json but no luck so far. Awesome little program thou, exactly what I have been looking for! -
He yea - no big deal I just fixed it myself. Pretty used to that in DCS by now lol. I may or may not have relaxed the shot requirements for the Swamp mission also haha, as the current ones can be a little tough when the AI decides to drive the whole time through towering buildings and cranes/light poles etc!
-
Pixelated shimmering bands in clouds.
VampireNZ replied to VampireNZ's topic in Weather System Bugs & Problems
Negative - different effect. Also I did search other cloud posts for a similar effect and didn't find one. LMAO - oh really? I have been away from DCS for 2 years and this is STILL a thing you need to do?? I thought these folders were getting deleted by the update process automatically. Testing - will get back with result. Cheers. EDIT: Looks to have done the trick. Should have been the first thing I tried lol. Back to deleting folders after every update I guess. -
It was more a FYI for the mission developer to let him know. The ship has a Helipad in the next clear landing spot so he has obviously assigned that area as the landing zone, and forgot to remove the tires specifying another zone next to it. I can progress the mission but need to land on the Helipad, not the tire zone. EDIT: Couple of pics.

-
VKB: 2024 Creeping Changes Update (STECS)
VampireNZ replied to AeroGator's topic in VKB-SIM Flight Gear
My Gen 2 STECS arrived this week and having the ministick on the front and a 5-way under your thumb is as awesome as you think it would be lol. Overall a really great throttle, especially if you fly different aircraft - simple swap of detent strip and you go from flying the F-16 with a detent with associated button pushes for shutoff/idle and an AB Detent to the Apache with none at all. Very nice. It is VERY fresh to have a developer that recognises their product could be better, listens to their customers, and release an EVEN BETTER product. Well done VKB! -
As per attached pics from Caucasus and Nevada maps.
-
Congratulations...I guess? If the mod maker wants to check his mission and remove the tires I experienced in the mission - cool. If not - then that's cool. too, just ignore it like all the other problems with DCS I guess.
-
Just FYI - the bulk carrier cargo ship on fire has a landing area defined with tires and dude in first area by bridge, but landing there does nothing - need to land on the H pad on next space further towards bow of ship. Bit confusing why tire landing area is marked out.
-
Any word on the Throttle cut-off release - depress lever working in F-16? I note it has been reported and noted internally...are there any plans to incorporate this control? Currently you can just click the throttle to cutoff without using the lever. Using a VKB with detents to activate this cutoff, it would be nice to require the lever to be pulled as well. Just a thought.
-
Do we also need to D/L the mod packs from Eight Ball?
-
Just turn it off in the MFD - disable the YAW channel. Removes the nasty surprise pedal stomping the flight computer seems to enjoy so much during standard S&L flight lol.
-
Bump to this. As a new adopter of the Apache I was surprised there is no way to just say "Hey George could you slew the TADS over to WP04/PLT ACQ point etc and have a look/scan for targets etc? I mean really? I don't want to be jumping back and forth just to move the TADS around - pretty sure the Pilot could just request the CPG to do it IRL? Even with the current Mod available to map the SLAVE button etc to the back, it only slaves to the CPG's ACQ, not what you select as the ACQ point in the back. It is also super-clunky having the only way to direct the CPG to targets is pointing your IHADSS vaguely in the right direction and commanding a search. Just a simple 'Slave TADS to Pilot ACQ and Search' option would solve everything. Major PITA and a real roadblock to flying the Apache from the back, forcing you to wear both hats which is just a little jarring especially when new to the module.
-
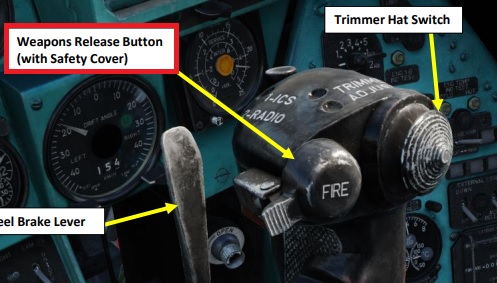
Weapons can be released regardless of the state of the Weapons Release Button Safety Cover on the cyclic. So with the safety cover in the closed position, somehow the button can still be pressed and weapons fired.
-
Yes I have noticed this also, even mentioned it I believe in the past. As usual it was just poo-pood by the ED white-knights and swept under the rug. You are correct, blades follow the same path, at the correct blade angle. It is not called a rotor 'disc' for no reason......
-
-
[NO BUG]Uncommanded Left Rudder During Flight
VampireNZ replied to Nealius's topic in Bugs and Problems
There is a mod that helps alleviate this somewhat - nice to be able to fly straight! - https://www.digitalcombatsimulator.com/en/files/3321595/ I constantly tweak the settings on the ground to get a good balance depending on how I am flying it etc - currently the settings I am running: -- Trim Notes! -- Negative Aileron values are to Starboard -- Negative Rudder values are to Port -- --aileronTrimTab = -0.0 DEFAULT VALUE ! aileronTrimTab = -0.0205 -- --rudderTrimTab = -0.666 DEFAULT VALUE ! rudderTrimTab = -0.385 So a tiny bit of right roll and half the default port rudder trim -
It seems for me at least the only way I can get the comms menu up is by pressing a button I have mapped to the comms button on the throttle.
-
The binding options to open/close the cover over the start button do nothing - also when you map a button to the Toggle function it only opens the cover but doesn't close it.
-
Yes the actual forces of the real thing must be gruelling - the RS can have much higher loads if you want but I limited my settings a little to not stress the base..or my pretty substantial installation base on side of simrig! Just drop the right roll setting to much lower than left as mentioned as yep you are much weaker pushing away than pulling inwards. Eentually you will hae it set so they feel eactly equal in each direction for same amount of roll.
-
Not sure it is entirely the 'noobs' that are the problem. As an 'interested 3rd party' investigating the Apache with a view to purchase (I have every other heli module already, so why not lol) - it is a little comical when you see a member of the ED Beta Tester Team stating.... "There isn’t ever a point when flying the real thing that I’m like “yeah, I’ll just let go of the flight controls now” and it’ll fly itself for me. It doesn’t work that way at all." and then literally in their VERY NEXT POST... "I can pick the helicopter up off the gound in the current OB build without applying any pedal whatsoever, from the position the pedals start at when you load into the sim" Just so we are on the same page, the anti-torque pedals are a flight control. As I said, just interesting and amusing - but I can see how these 'modern-ish' helicopters with their fancy 'stability control systems' can cause issues in sims such as this with most people not having access to the 'correct' type of control device as used in the real machine, and want to enojoy the 'challenge' of flyinig a helicopter. I personally enjoy flying the Hind much more by disabling all SAS systems, but they are useful for boring A-B flying. I guess we need to remember these machines are designed as weapon delivery platforms - not machines to test the flying dexterity and ability of the pilots 24/7 when they would rather be focusing on what is happening in the battlespace and employing weapons etc.
-
Ok thanks - have been away from DCS for a while, and was playing solely in VR before then, so prob forgot it was always zoomed out when you first entered cockpit.
-
Not sure what I have done, but when I get into any cockpit for the first time in any aircraft, the FOV is set to 84.4 and I need to press NumPad Enter to Zoom normal to the value of 65 I have set in SnapViews.lua file from the \saved games\dcs\config\view folder. I don't have anything mapped to Zoom axis on any of these aircraft. Never encountered this before but no doubt I have touched something I shouldn't have - help would be appreciated. It's not the end of the world but seems strange I have to reset FOV every aircraft start now.
-
I also have the RS FSSB and while that stick DOES actually move (as per the real Viper stick, as no movement at all didn't make the pilots very happy), it is only minimal like 1/4". Using the stick you don't even notice the movement and it is inconsequential really - you are not trying to 'reach a certain amount of movement' or anything - just using pressure. You also need a LOT of force, probably way more than you think. Say around 25lbs in pitch, and 17lbs in roll or thereabouts for a 'real' feel. I used to run around 12lbs in pitch and 7 in roll on the RS, which felt like a LOT - you need a pretty sturdy mount! You also need to 'offset' the pitch axis as if you have mounted it on your side - you don't pull directly backwards, there is always a bit of sideward deflection too, so I imagine in your software you can input some rotation to the pitch axis. One last thing that also might impact why you are noticing a change rolling left - you don't have the same load for LH and RH lateral movement, as you can naturally pull a lot more 'inwards' - so left roll, than you can 'pushing outwards' with your forearm, so RH roll. Because of this you set the RH force to maybe 60%-75% of the LH roll force and you will find with the same effort you are rolling equally. A good way to check is just open the whatever calibration software you have, or even the axis tune in DCS, close your eyes, then move the stick from one extreme to the other in pitch, roll etc just by feel and have someone watch the output - obviously the pitch +/- should be purely inline, and the L & R movememnt should be equal...if you get me. I also use a small program called FreePIE that actually beeps at you when you are reaching the limits of movement much tlike the Gripen etc, so you don't just yank like hell and break it off thinking you are getting more movement. Once it starts beeping you know you are at 95% (configurable) of total axis movement/force available. A previous thread about the sidestick - Is pretty awesome once you get it dialled in, makes flying the F-16 really fun! EDIT: Also have this interesting document on Sidestick design requirements from back in 79 when they were designing the Viper etc. Flying Qualities Design Requirements for Sidestick Controllers Is stamped "Approved for public release; distribution uinlimited" - so assume it is safe to post here. If not then ED, feel free - I don't need more points for posting public docs lol.
-
fixed Invalid Username of Password (ED Website OK)
VampireNZ replied to Dangerzone's topic in General Bugs
Same for me just now -
F16 Landing Question at Batumi air base on Caucasus MP
VampireNZ replied to Justin1Ntime's topic in DCS: F-16C Viper
Haha yea can be 'interesting'. If you are losing rudder authority as you slow down, try using differential braking to keep it straight initially, and just engage NWS once you are at taxi speeds.