VampireNZ
-
Posts
1924 -
Joined
-
Last visited
-
Days Won
2
Content Type
Profiles
Forums
Events
Everything posted by VampireNZ
-

Mi-24P ASP17 sight reticle improvement
VampireNZ replied to Sundowner.pl's topic in Utility/Program Mods for DCS World
Great mod - thanks! It is a shame all HUD projected imagery in DCS looks like it is on a perfect LCD screen, not a projected image. -
I use Kensington Trackball stuck next to my throttle - works perfectly in VR, and you can map some generic inputs to the extra 2 buttons on it (and combinations) - so I have ESC and F1 mapped, along with combined-press of top two for spacebar. Also it becomes very natural to reach out and use button boxes positioned in front of you, along with Cougar MFD's and I also have a full-size ICP mounted in front of me for F-16 - no problems locating the buttons with some prompts stuck to a few buttons etc.
-
[Official] SimShaker for Aviators
VampireNZ replied to f4l0's topic in PC Hardware and Related Software
Just saw in Hind updates... Ammo counter panel implemented Brrrrttttttt -
I sort of feel a little more time could have been spent on bindings for actual cockpit controls that get used regularly during flight...as opposed to 47,000 different non-descript lights etc.
-
Really hope this is getting some priority by ED, instead of hiding behind the 'need a track/missing info' tag - as this is major PITA #1 with this module at the moment. Yes you can fly around it, but jeeze it is like a box of chocolates every time you are in stable flight and hit the trimmer button...never know what you are going to get
-
wip Landing Gear Hydraulics seem too strong
VampireNZ replied to SnuggleFairy's topic in Bugs and Problems
Pretty standard behaviour for most a/c in DCS TBH. -
Just remember to keep 'flying' the aircraft after touchdown, just because you have touched the ground doesn't mean you just relax and let it do whatever it wants to.
-
Question: Low Level Navigation in (Near-) Zero Visibility
VampireNZ replied to Doc3908's topic in DCS: Mi-24P Hind
Flew in the RNZAF P-3 Orion for seven years and we were the only aircraft in NZ that could fly IMC below MSA (fully enveloped in clouds with zero visibility, flying below the published area minimum safe altitude between mountains/islands etc) using radar for terrain avoidance. IMC in a helicopter is a pretty bad idea and things can go real bad real fast! RADALT won't tell you there is rising ground ahead, but provided you stay above local area MSA then yep NAVAIDS will be fine getting you from A to B provided you have adequate IMC instrumentation with backup ADI, anti-icing etc. (which the Hind does), and are happy flying 100% on instruments in no vis conditions. -
confused: right pedal causes additional lift
VampireNZ replied to Rongor's topic in DCS: Mi-24P Hind
Fair question - I remember the same question coming up for the Mi-8 Hip, nice comprehensive reply here from Frank Lombardi: Question: Why does a helicopter with rotors turning clockwise (e.g., Lama or Mil Mi-8) gain height in a steady spot turn to right and lose height in a left spot turn? Answer: In helicopters with a conventional main/tail rotor, any increase in pedal application that opposes the torque effect of the main rotor will increase the total amount of power demanded from the drivetrain. With main rotors that turn clockwise when viewed from above, this is a right pedal input (left pedal in those turning counter-clockwise). Now consider a turbine-powered helicopter such as the SA315 Lama with governed engine/rotor RPM (N2/NR). Upon applying right pedal during a “spot turn” in the clockwise-rotating Lama, the increase in power required is sensed by the governor as a slight droop in the N2/NR. The governor then tries to maintain the N2/NR by adding fuel to raise the RPM back to normal. Keep in mind that the governor is sensing rotor RPM through a system that is fixed to the airframe, so as the aircraft yaws right, it follows the direction of the spinning rotor shaft, and the governor senses a relative rotor RPM that still appears lower than desired. The response is a continued increase in fuel flow by the fuel control, and a resulting higher-than-necessary RPM relative to the air mass you’re flying in. It does not take much yaw rate to cause this. Yawing at 30 degrees/second (that’s 12 seconds for a full 360-degree pedal turn) will change the relative rotor speed by 5 RPM. Since lift is proportional to the square of NR, even this small change in RPM will bring an increase in main rotor thrust enough cause the helicopter to climb. Of course if you add left pedal the opposite is true, and the helicopter will descend. https://www.rotorandwing.com/2011/11/29/height-variations-in-rightleft-spot-turns-with-rotors-turning-clockwise/ -
You 'should' be able to, but I haven't had any luck enabling Altitude while travelling with or without Route mode active. En-Route Flight with Activated AFCS Mode Route En-route flights with activated mode Route should be performed in horizontal flight at altitudes from 50 up to 3,000 m and at flight speeds from l20 km/h up to the maximum' Set a selected flight path angle (SFPA) (3rr| by means of the 3nv-24 selector. Switch on the Route channel, to which end: - stabilize the helicopter in the straight horizontal flight; - zero the forces on the control stick by pressing the force-release button; - make sure that movable indices of the channels Yaw, Roll and Pitch are in the neutral position on the autopilot control panels; - switch on the AFCS by pressing the annunciator-button ROUTE; as this is done, the green annunciator-button ON is to illuminate; - switch on the channel Altitude of the autopilot and activate flight speed hold. After 10'..15 s of flight, make sure that the helicopter is stabilized in the selected mode and continue to fly with free control.
-
-
Switch off Damper while taxiing for easier control of direction, switch on again before T/O

-
I haven't fired ATGM from front seat, but as I understand it there are a few issues with Petro as pilot at this stage, same as with the whole trimmer system etc. But firing the ATGM from hover is not ideal in any case as you need to nose-down quite a long way to place target in middle of reticle to allow Petro to actually fire missile, but the tracking is fine after that. So I prefer to fire a couple at speed approaching target (and so heli is angled towards target) and then turn away to reposition.
-
You're not in a stable stationary hover, and it looks like you haven't trimmed out all cyclic deflection with the trimmer button. Check the doppler gauge next to airspeed indicator - you are moving fwd when you engage HOVER and as such the AP tries to stop this forward movement. You can see on AP controls indicator the longitudinal 'T' pitch channel is at max down and runs out of authority trying to arrest the fwd movement (hence the 'bobbing'). Coming to a perfectly stationary hover at that altitude is pretty tricky but you need to at least have absolutely no white showing on the doppler gauge, and even then you can still have some movement (it really needs to show finer movements). Coming to a perfect hover fully trimmed hands-off is also pretty tricky at the moment due to the 'overrun' trim issue when you hit the trimmer button. It is almost better to use the trim hat to try and trim out all the stick forces.
-
Not at PC but from memory try 'Taxi Light'
-
no bug Weird Controls on Mission Start
VampireNZ replied to WolfK33's topic in Controller Questions and Bugs
Agreed, no big deal in a fixed wing - kinda big deal in a helicopter lol. -
Is doppler nav impaired by low-altitude flying?
VampireNZ replied to Nealius's topic in DCS: Mi-24P Hind
Was on Cyprus...and not a small lake -
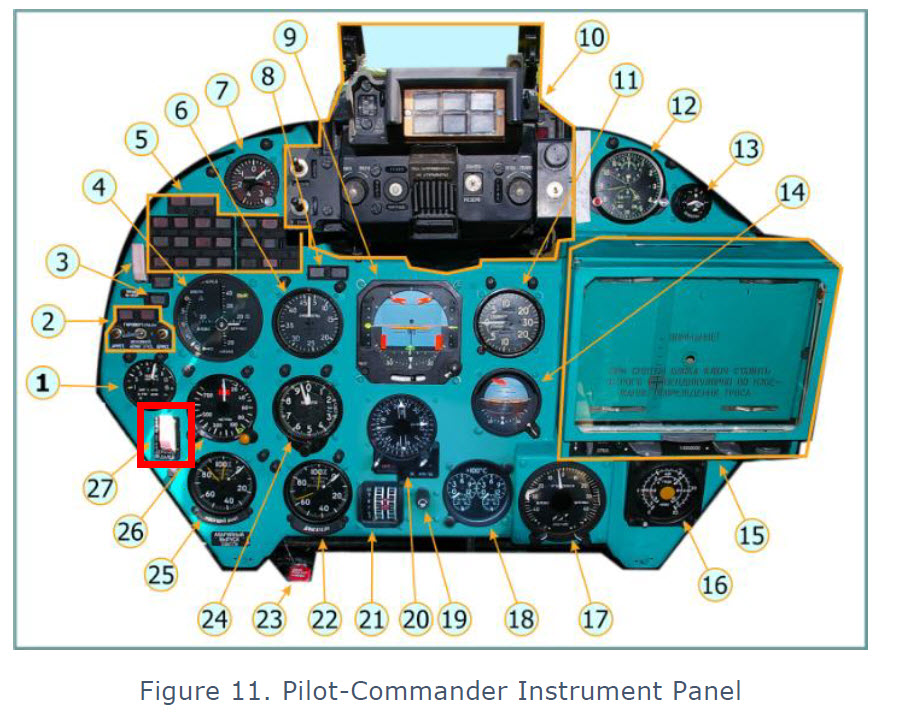
Info from RL Hind manual... At hovering, make sure that the main rotor RPM are at not less than 93%, directional control forces are adequate, the pedals are not against the stop, and the helicopter maintains a selected flight mode. If the helicopter does not reach a selected hovering altitude, or main rotor RPM are less than 93%, perform landing, decrease helicopter weight and repeat test hovering. The forces occurring on the control stick shall be removed by frequent momentary pressings of the force-release button.
-
Is doppler nav impaired by low-altitude flying?
VampireNZ replied to Nealius's topic in DCS: Mi-24P Hind
It would just be nice to have sim topology that matched the maps - was trying to use a lake for a visual reference for positioning off the map and didn't see it when I expected to, so spent 10 minutes surveying the local area to try and find where I was....only to find the lake on the map didn't exist in the sim. -
Don't forget your “115v” and “36v” transformer switches on same panel as Gen switches.
-
Really looking fwd to when this 'additional bump' bug gets removed from the trim system, as it is probably the most annoying thing about flying the chopper at the moment. I try to avoid any trimming as much as possible now and just fly with stick displaced, or use the trim hat to remove large displacements. It also makes coming to a stop and engaging hover hold pretty tedious as you need a pretty much hands-off stable hover, so you hold a good hover with stick displaced then tap trimmer button and centralise stick, and it bumps past your stable hover to move off in the other direction! So for now just stuck an 'INOP' sticker on trimmer button lol - doesn't ruin the party too much thou and still very flyable and much fun.
-
Although I have never had an issue with the fan in Hip/Hind - I don't see anything wrong with the option to remove.
-
https://www.flightsafetyaustralia.com/2018/11/lte-the-cliff-edge/
-
[Official] SimShaker for Aviators
VampireNZ replied to f4l0's topic in PC Hardware and Related Software
Personally I am running the Beta to get the feedback for the new Hind as it is tweaked and updated, otherwise Stable is fine. -
[Official] SimShaker for Aviators
VampireNZ replied to f4l0's topic in PC Hardware and Related Software
Same deal here - just installed the new Beta version and hit the Repair DCS output file or whatever it's called button and was all good.