AeriaGloria
-
Posts
5896 -
Joined
-
Last visited
-
Days Won
2
Content Type
Profiles
Forums
Events
Everything posted by AeriaGloria
-

AIM-9 loses growl depending on relative bank angle vs target
AeriaGloria replied to SgtPappy's topic in Weapon Bugs
Maybe they finally simulated the darker underside of the reticule. -
investigating mk82, 83 bombs explosion radius too large after update?
AeriaGloria replied to SalakauHeadman's topic in Weapon Bugs
Many Soviet bombs now have same explosive update, namely FAB-250-M62, FAB-500, Betab(shp) -
With COOP, HMS, first sensor to lock is primary. But both will lock when possible anyhow. If you get HMS lock more then 30 degree from nose, guaranteed to be radar lock only with COOP.
-
It should be possible, it was on older R-27, to reach 90 km with R and 130 km with ER. The limit is radar range. So you’ll probably be limited to 70 km in fulcrum unless it’s home on jam.
-
If maintenance manuals say it can be fixed, I believe them
-
First detent switch - toggled ?
AeriaGloria replied to Dača's topic in Controller Questions and Bugs
Agreed -
First detent switch - toggled ?
AeriaGloria replied to Dača's topic in Controller Questions and Bugs
I would like it if first detent could also be made a “toggle.” A lot of us don’t have tons of switches or dual detent triggers -
Radar losing lock way too easy in all modes.
AeriaGloria replied to LaCiKa's topic in Bugs and Problems
Well, there is also no memory mode currently implemented. -
You should land closer to 300 kmh pre flare. That’s how real pilots do it.
-
The Su-27SK manual also uses the words “it is POSSIBLE when flying with radar on for SPO-15 to malfunction.”
-
Radar Lock at short range but not ablte to fire the R27R
AeriaGloria replied to Revor's topic in Bugs and Problems
No, you said you locked with HMS. If SUV knob is in radar position then it’s using radar, scan or vertical scan. -
Radar Lock at short range but not ablte to fire the R27R
AeriaGloria replied to Revor's topic in Bugs and Problems
It is becuase your HMS lock is only for IRST Pnce we get coop, then we can use radar with HMS -
Grim reapers is often a path to confusion
-
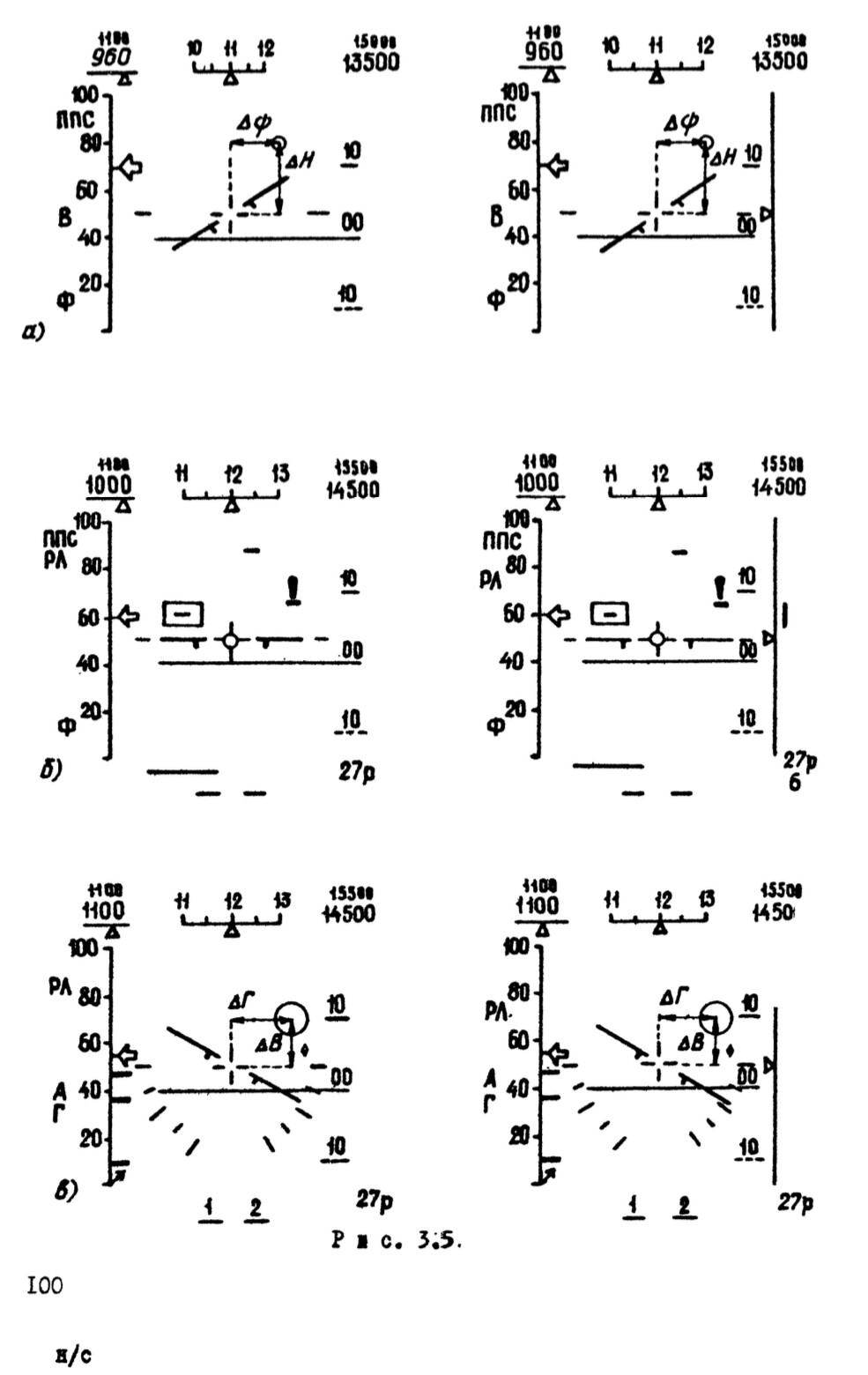
If you lock someone with deltaH -6, outside missile range the circle will guide you to fly -6000m under them. Close to missile range, you get Gorka (r) and the circle will move to target altitude so you equalize altitude. It is saying you keep deltaH 0 after lock. There will be no sudden change in circle height as you approach missile range
-
Most Efficient BVR climb and Highest performance Speeds
AeriaGloria replied to AeriaGloria's topic in DCS: MiG-29A Fulcrum
The variables are current fuel consumption. It divides remaining fuel by current fuel consumption and uses TAS to find distance flown until tank empty -
Not a line: that’s just on the picture to describe HUD symbology. It shows as a director dot with range, occasional commands, and when turn radar on automatically selects it yes unfortunately, why I hope we get a flexible Lazur implementation
-
Is it not possible for two different manuals fire different audiences to say slightly two different things?
-
I don’t think UTG supported any armament
-
??? Our version does get Lazur. It shed up on HUD as both HUD left. HDD right

-
IRL gun circle should cover target at 1600m
-
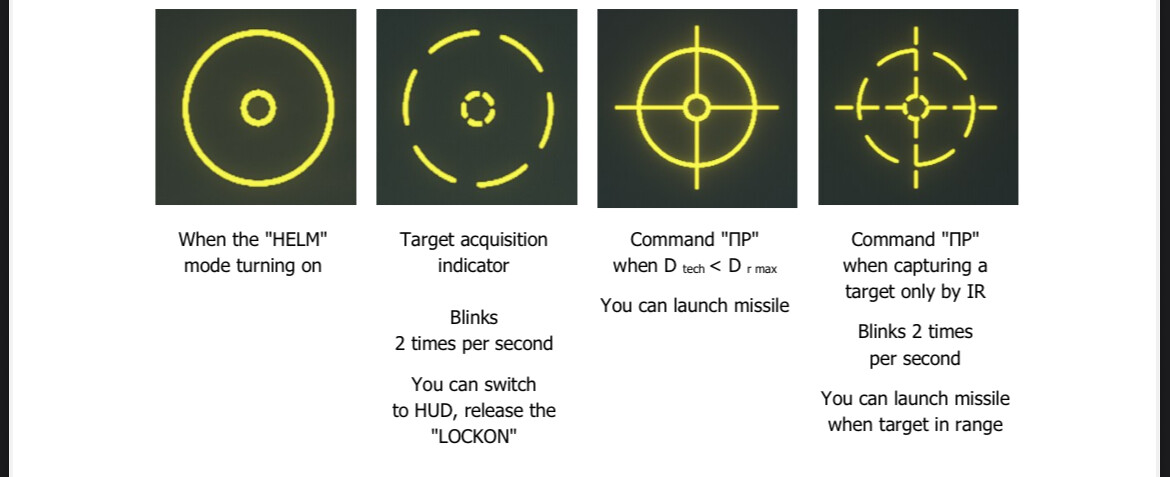
1. EKV/dummy is an auto mode, if you put Reese there it should turn on automatically when needed 2. yes HMD symbology is same for radar or IRST lock. Two dashed circles. And right now it’s impossible to use radar with HMS. Manual
-
Yes the ranges are off……… but I like it
-
It is just unfinished and all effected by range scales Normally cursor is 8 degrees wide 5 km long With TWS is 8 degrees wide and 10 km With scales changing from 50-150 km. You can see what happens
-
The entire airframe is very different
-
The reason TWS mode exists is specifically for when flying without GCI or datalink, since you don’t get target speed info, TWS does it for you