AeriaGloria
-
Posts
5893 -
Joined
-
Last visited
-
Days Won
2
Content Type
Profiles
Forums
Events
Everything posted by AeriaGloria
-
Pre designation gives you correction for either wind or target movement. You do this by holding lock button, putting reticule on target, and releasing lock button. After 2 seconds The correction will have been computed once you place the reticule on the target a second time. It is better then say MiG-23, where it is required to keep reticule exactly on target for a few seconds. After releasing lock button laser ranges and builds mathematical model of where target should be if stationary/no wind in comparison to your speed height and movement. After two seconds the FCS assumes your reticule is on target and produces correction for that position. So when you place reticule a second time and fire, the proper movement/wind correction is calculated. One thing with this is that the calculation only lasts around 8-10 seconds, then you will need to do it again, and is only for that specific target. A stationary target in no wind requires no correction so no pre designate needed. Hmmm? Any MiG-21 with RP-21 radar could guide the missile. It was designed entirely for MiG-21. I think you will find the normal weapon aiming mode very precise. It will be very precise for bombs and gun, rockets will be more precise the faster you are.
-
And part of pressurization system no doubt
-
Starting this to not clog up the forum and put all my videos here. Today is Yaw Autopilot! Learn everything you wanted to learn about it here and find out things you won’t find out anywhere else!!
-
- 6
-

-

-
IRL IRST range is 15 km detection 12 km track for head on Mil MiG-21. Add planes with bigger heat signatures, in rear aspects using possibly afterburner, and no surprised to detect 30-40 km away. Being able to range them though will be limited by MPRF detection though which would be 18-40 km depending on altitude, background, RCS, etc
-
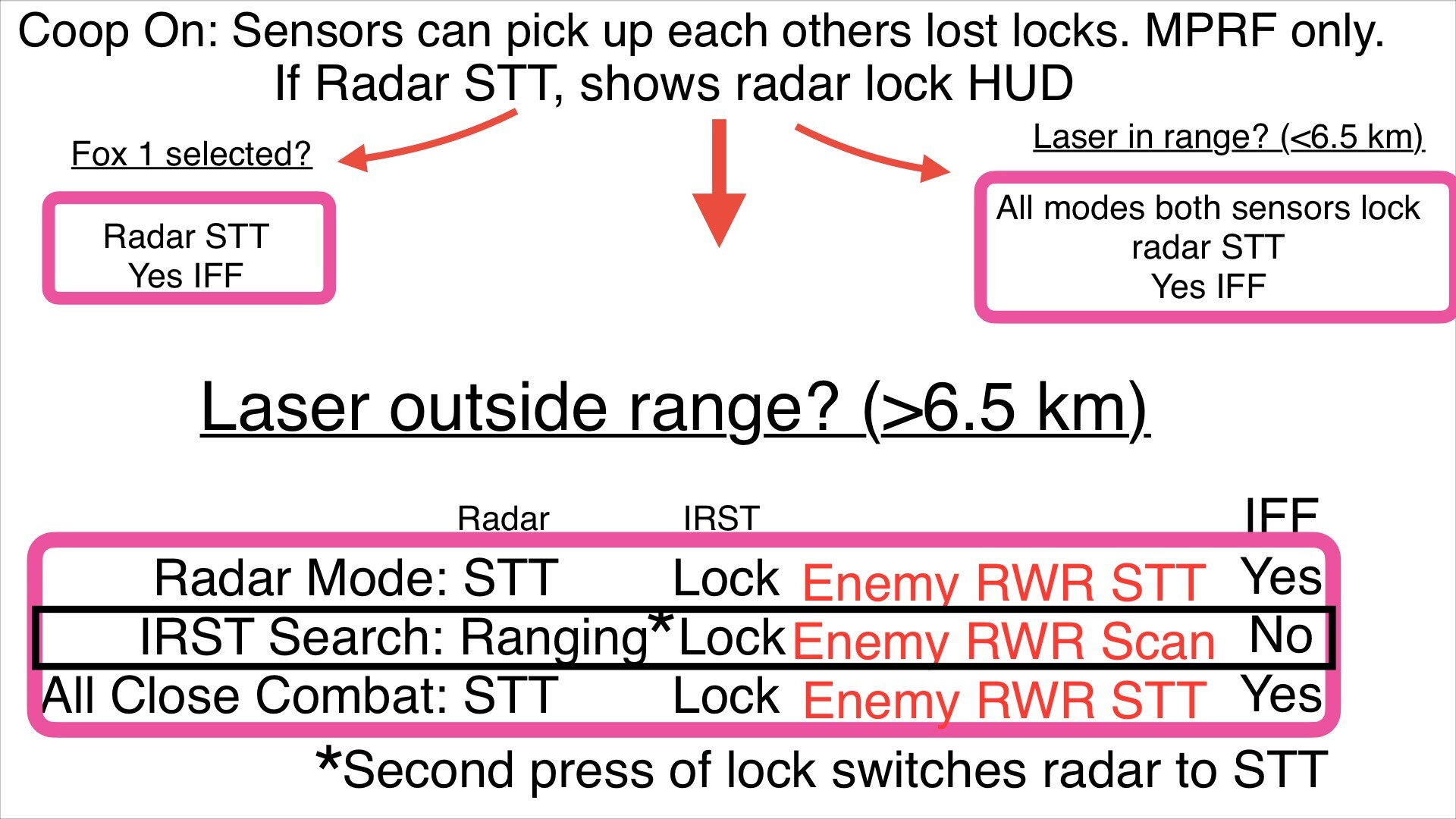
Well, I don’t think it would need “nerfing.” The range of the radar in FC3 is pretty much spot on. There are differences that will make it harder to use in FF though, just becuase it is realistically modeled. For example. Loco will no longer be instant but take 1-2 seconds at least. If you lock within max missile range, it will take the R-27R/ER 4 seconds to get ready before it can be fired(just like sparrow, but this process is done early in some situations). You will have less HUD symbology ( to focus on killing!). And radar/IRST won’t pick up each others lost locks unless coop is turned on which locks radar to MPRF. IRST won’t instantly range at all ranges, but the laser will be limited to 6.5 km requiring radar range beyond. So it will be a little harder to use, some things will take longer, but I expect it good users to still make a killing using its speed and altitude to throw the R-27R far and fast. If all you care about is competitiveness and beating someone, maybe not. But for me I expect to get a lot of joy from working the systems, and thus even more satisfaction from making kills. It will have an advantage in air to ground and gun modes though. AG it can calculate wind and movement for any weapon. And for gun mode, you have an alternate mode that allows you to lead a target up to 12 degrees. Whereas right now in FC3, the mode we have limits us to 6 degrees lead.
-
Yes I was confusing the main modes for interaction sub mode at first. This quote you attach, is it for interaction on or off? The above passage stated when selecting R-27R in the interaction mode upon radar locking, page 71 " In this case. the SEl system displays the information of the RLPK complex in the target tracking mode, implemented by the NO19" And in the case that both systems fully track “2. If the KOLS station was the first to switch to the target tracking mode, but the RLPK complex accompanies the target not only by angular coordinates. but also by range and approach speed, the leading complex is the RLPK complex and the controlling on-board computer is the S-31 BCVM. The SEl system operates in the target tracking mode according to the RLPK complex data,” I wouldve thought if such a case did happen, it would show IFF as SEI show radar display. Same for the case described in many manuals where with interaction on, in TP strobe, if the lock button is pressed before the appearance of the laser range it will transition to full radar lock, and when laser range would appear it would transition to radar lock anyways. I would assume it would show radar lock in such a case as the manuals say it transitions to leading RLPK, but I guess it can’t be helped if not if this it’s the way things are and SUV in RL is required for IFF circuit even if HUD displays radar. Would love word from ED how they intend to model the system.
-
Yes I am only going off the MiG-29B technical manual (interaction/cooperation section) that ED has used before in the past and is sure to use this time. I have seen it wrong before, in regards to HMS stages of symbology. But oddly a university PowerPoint that details the radar says a similar thing about interaction/cooperation mode. For example it states that if flying with TP vertical scan, OPT, Helm, with interaction/cooperation on, once you get a lock and radar locks on additionally it will switch to radar HUD view. Such that using coop with those modes is enough for IFF. It also goes into logic with coop switch that if radar is not used for ranging quasi scan, it will STT

-
.
-
Sure? Doesn’t mean R-77 can’t work fine with R-27. It still describes a very similar datalink situation to R-27 that N-001 or N-019 were designed to send while in STT for up to two missiles. I don’t see a reason for J-11A, Su-30MKK/MK2 to be incompatible with using R-77 in STT. It has the ability to send the needed commands the missile is described to require (Cartesian coordinates and target size).
-
So…….. upon careful re reading of documents…… I am enlightened to my past mistakes The sensor changing without using the knob switch is only in interaction/cooperation mode, (duh!!!). So let’s say you lock someone from TP scan mode and want to IFF. Best way is to select cooperation. Select fox 1, then un select it after seeing “C” or not. Or could switch fox1/coop sequence. Let’s say you enter lock from TP vertical scan, helmet, OPT, but don’t want to STT too long, you’ll have to lock with cooperation off. When you’re ready to IFF, select cooperation to see IFF status then switch coop off or it will keep giving them STT as long as laser range is present. Same with TP scan or even gun mode, inside 6.5 km, once it gets a laser return radar just locks (now that it’s not needed for ranging). And HUD will show radar mode.
-
Well, I did try to say “seemingly” identical, as in, as far as we can tell Because of course here the missile is generating the “activate seeker” command and not the plane sending it. Just trying to say there is nothing incompatible between STT and R-77, an overview of the airspace is not a requirement, and that these PD radars of the 80s were originally designed to transmit datalink during STT in any case. I wouldn’t be surprised if it used barker code like the R-27!
-
 For Mi-24, we got a quick start guide early. It was nice. But know what we still only have?
For Mi-24, we got a quick start guide early. It was nice. But know what we still only have? -
It does not need to though. As the manufacturer describes it, the datalink process is seemingly identical to R-27 and that is the only interaction between it and the host during missile flight. It gets updates in Cartesian coordinates from the radar and target size. That’s all it needs. It even calculates pitbull on its own. And any R-27R/ER carrier can send datalink updates in STT for up to two missiles
-
Okay how is the TWS mode activated in N-001? In Su-27SK manual I find no switch labeled TWS/TWF and no radar function described as such.
-
One thing people can do atleast with FF is switch the ARU as they like. So you could say, potentially move it into “Hard” where each trim press will move stabilizer as little as possible. I just am not sure if the way it is adjusted is 2 position, easy or hard. Or if the two positions allow you to make small adjustments if actuated shortly.
-
Ah it makes sense you were referencing this! I just went through the radar section, I see it mentioning RVV-AE use with TWS, that R-27 use transitions to single target track. But not necessarily excluding R-77 with STT. But I understand if I missed something. It stills blows my mind reading this that it can fire multiple R-73 onto different TWS tracks The J-11A has a TWS mode in DCS, not real life. Not something the N-001 does, which is odd. But then again in MiG-29 9.12/13, it’s meant help fighting without datalink as it auto selects a target. I was very surprised when I found this out myself that it does not have it. But I guess different manufacturers just do things differently, maybe it was a requirement on original 9.12/9.13 N-019. What he showed is a radio technical manual for the Yemeni MiG-29SMT. It’s a good read if you can find it. I agree about TWS2, I’m sure it’s down to how they coded it way back then. I’m doubtful for a change, but if there a proper change to for it only emit a RWR scan indication, it would be a really nice feature to have. Maybe ED could tidy it up to pair with FF……..
-
When it’s available I’m sure it will be shared on the front page. The FC3 manual won’t help.
-
Fun fact, the prisms require their own heaters.
-
The trim actuators cover a set range. The ARU adjusts the control authority through speed and altitude. With that system active, I would think it only stay the same at high altitude where the ARU stays in “easy” or full authority mode.
-
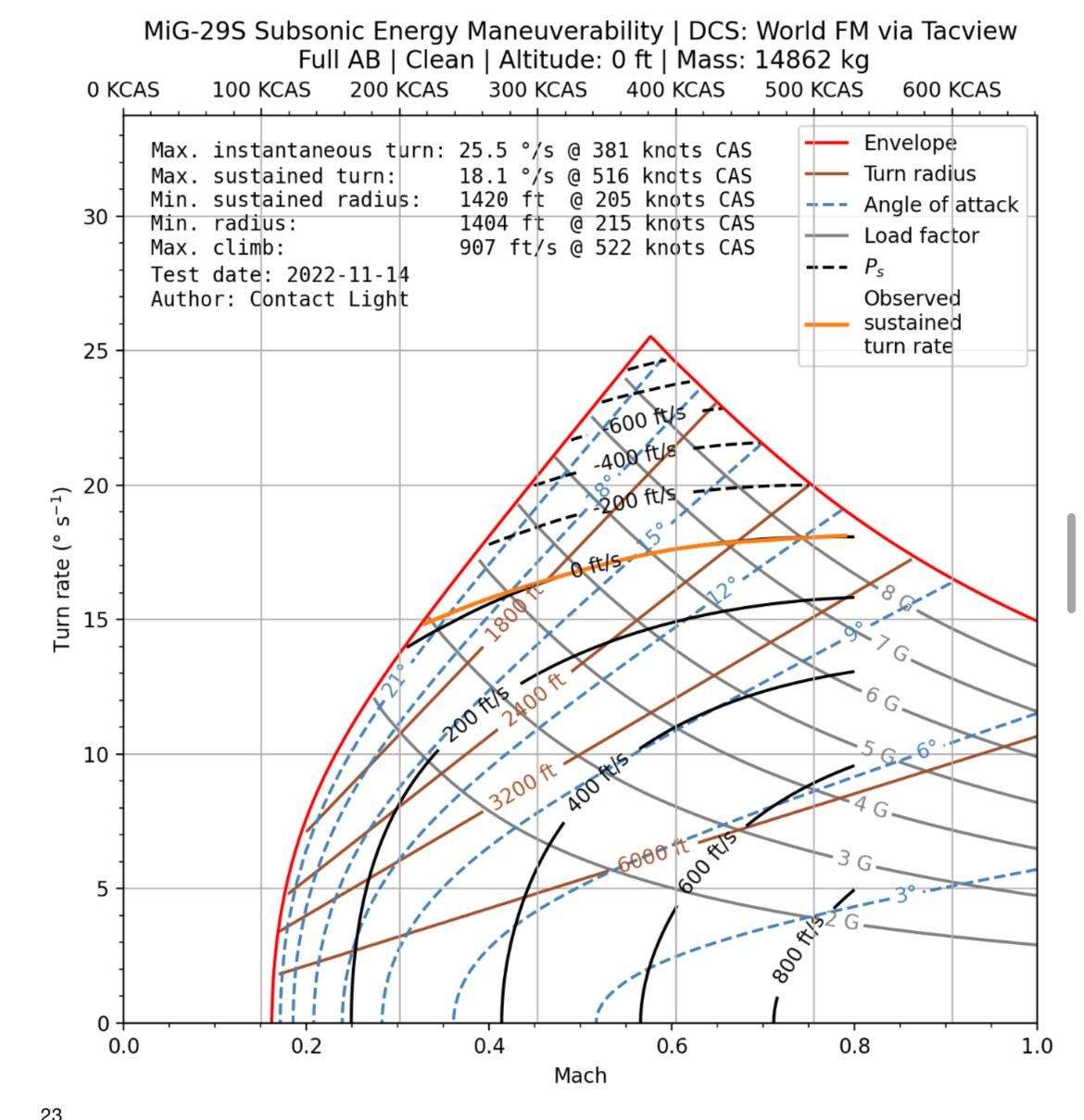
If it can pull 9 G at 900 kmh, that’s 20 deg/s flat. For any EM chart, it is where 9 G and 20 deg/s intersect, a hair above Mach 0.75 at ground level
-
Well you don’t have proof R-77 can’t be fired from STT The J-11A radar only has a STT mode. That’s all it can use to fire. The N-001 was not capable of TWS. And it is what ED and Deka corroborate. Su-30MKK/MK2 N-001V/N-001VE can be capable of TWS firing of missiles as a customer option. But it must’ve been not purchased becuase I’ve since learned it is only capable of firing them in STT. (Edit: no longer needed). If you ever want to share your sources or the relevant parts such as the R-77 rocket design manual you mention, I’ll be happy to take a look at them.
-
Okay something definitely changed since I flew in dogfight server all the time many months ago. At low altitude I can now pull 9 G all through the expected speed range. It takes either almost or full back stick, but it does it. Maybe a stealth fix while they work on the FF…..
-
Expected sensors/platform performances compared to FC3 ?
AeriaGloria replied to LetMePickThat's topic in DCS: MiG-29A Fulcrum
The radar range has been semi recently tweaked in the FC3 module to be very accurate. Expect it to be close. -
Hmm, I wonder if it’s more of sub-1500m problem The dampeners do have filters that correct for altitude, Mach, IAS, AOA. Since it only reacts to movement, if it was too strong it could reduce max G. Unfortunately most dogfight and gun servers are at such low altitudes
-
What was your speed? I did between 900-1000 kmh it seems be oddly limited to 7.5-8 G