Swift.
-
Posts
2774 -
Joined
-
Last visited
-
Days Won
1
Content Type
Profiles
Forums
Events
Everything posted by Swift.
-
You mean like giving it the IR marker that would be accurate for a USN hornet carrying ATFLIR other than the 4 off, that I can only assume were used for testing pretty much exclusively
-
So ED fictitiously give us ATFLIR. Fair enough. But they give us an ATFLIR that is 1 of 4? I mean come on. But don't worry, it'll be alright because as it's a USMC/USN hornet, we can also use a USMC litening. Right....
-
2003 is interesting, seeing that in 2006 only 4 legacy hornet compatible ATFLIRs existed.
-

correct as is LAU-115 1x AIM-120 replaced with dual rack?
Swift. replied to bennyboy9800's topic in Bugs and Problems
Swiss hornets have a different pylon on the outers. Similar to the ones on the outer of Rhino. This pylon allows a direct mount lau-127 where the pylons used on all other hornets does not. -
This is probably a better showing of it
-
no change in 2.7 DCS 2.7 / F/A-18C Stability in Roll
Swift. replied to Scotflieger's topic in DCS: F/A-18C
Difference between never needed and made do without. I can guarantee that you needed it at some point, you just made do without it by roll trimming. -
You cannot slew in AUTO, this is just an error in the wording of the manual. Observe in game how AUTO INR is briefly entered on commanding AUTO, this is until the AUTO has time to acquire a track wherein it will switch to AUTO proper.
-
I just watched your track, and as you said its clear what is happening. The radar is generating the track after one hit, it initially shows with a high mach and then after the second hit (after 1 frame time, in this case looks like about 5 seconds or so) it resolves into mach 0.6 On the topic of frame time, as you have your radar set to 4 seconds and the frame time is about 5 seconds, you are actually losing the track every 4 seconds. This is why it keeps untargeting. Until ED fix the MEM logic, you will need to set the time to something longer than the frame time, in this case 8 seconds would do. Additionally having watched the track, I can see that the brick hafu combo you are seeing is because HITS is selected.
-
Can't go back using the litening.. ATFLIR all the way
Swift. replied to Mizrach's topic in DCS: F/A-18C
In DCS? they are both the same because sensor limitations havent been modelled yet. -
When you slew the TPOD the WP flag will move across the screen. Its a bit hard to pin down the exact behaviour and when, but it looks like: Left bank + Left pod direction = WP drifts Right bank + Left pod direction = WP doesnt drift and vice versa. WPflagdrift.trk
-
I think INR AUTO is the mode the pod would be in when the AUTO track initialisation box is shown. Where it is not actually tracking anything, but it is attempting to acquire an AUTO track so will need to be INR stabilised.
-
You will need to separate these out into individual threads if you want them to get reported. no2, I don't think that behaviour is necessarily a bug. It sounds more like something that would happen from track ambiguities, and it clears up over the course of the frame time. no3, So we are currently missing correct MEM logic for tracks on the hornets radar, but in the meantime make sure you have a long enough time set on the data page. If its shorter than the frame time the track will disappear before it has a chance to be detected again. no4, not quite sure what you mean with this. It sounds like it might be ED finally implementing some proper stuff. Maybe a screenshot would help?
-
Ask your SMEs.
-
correct as-is ATFLIR maximum zoom vs Litening TGP
Swift. replied to Viper 13's topic in DCS: F/A-18C
You know DCS isnt real right? Theres not actually a real pod attached to your jet. Its just a bit of code that allows a view port to be 'fixed' to a weapon pylon which feeds a game view into your MFD. The pods sensor/hardware, as you say, is just ED overlaying a monchrome filter to the raw game view. So Razbam 'upgrading' to G4 consists of nothing more than updating their controls and software interface. -
correct as-is ATFLIR maximum zoom vs Litening TGP
Swift. replied to Viper 13's topic in DCS: F/A-18C
It wasn't the pod that changed, it was the jets software interface. When they say 'Litening G4' they mean 'Software such as would be found on a Litening G4 jet'. The pod remains the same ED-vision thing -
Can't go back using the litening.. ATFLIR all the way
Swift. replied to Mizrach's topic in DCS: F/A-18C
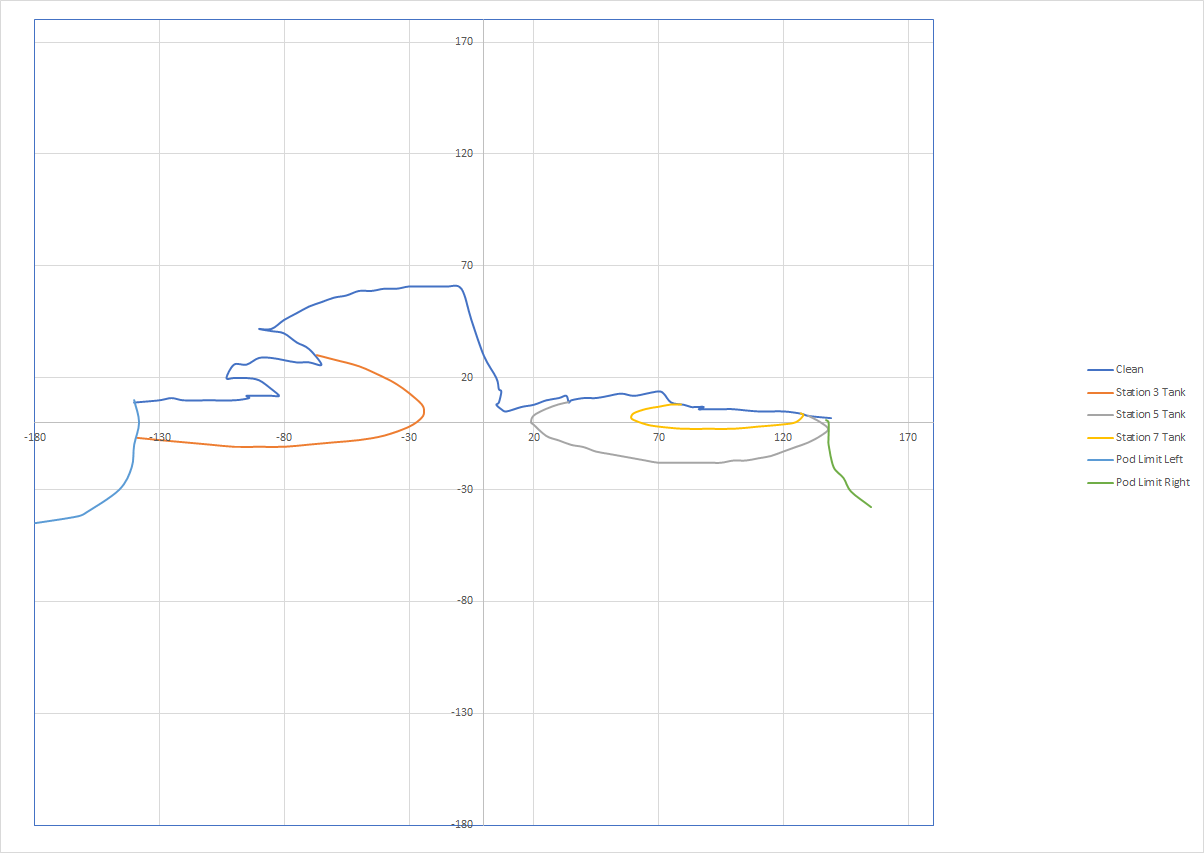
The masking zone for ATFLIR is really not as bad as you might think.
-
Correct, LAU-127 is a single rail launcher. However, when you open your copy of NFM-200 or NFM-210. You will observe that LAU-127 is not mentioned anywhere separate from its parent rack LAU-115. There are no performance metrics given for a direct mounted LAU-127. It does not appear in the list of interference drag indices.
-
It's a feature of real ATFLIR. Whether ED decide to grace us with its inclusion is another matter.
-
I wonder if thats related to the display resolution setting
-
Returning to INR from AUTO offset in ATFLIR results in a drifting TPOD view. Use ATFLIR Designate a TGT Switch to SCENE Track Switch to AUTO Track Offset the TGT Switch back to INR mode Slew slightly Observe the Pod drifting as if it were in snowplough. ATFLIRTGTDrift.trk
-
I believe thats always been the case.
-
The technique is to pull back fully on the stick when below 100kcas, apply full brakes until the antiskid cuts off at something like 50kcas iirc, and speedbrake of course, bearing in mind its affect on directional controllability. I would test with this technique as this is the maximum deceleration that I'm sure the graphs are drawn from. As for the 4500ft number, that looks awfully like the number for a wet runway in the given 32k GW example.
-
As previously reported, its all out of whack right now.
-
G limiter in Hornet is 7.5g by defualt.
-
Some of the BITs work, they startup BIT behaviour is all goofed though. So for now all you can do is just manually run them and have fun.