
GumidekCZ
-
Posts
869 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by GumidekCZ
-
I just wonder who is responsible for not even inform DCS user's about this change in last patch. Did the person behind this change realized, how big problem he made and how many players are affected by it? Now all the user skins on ED have wrong Lua. I expect that only minor number of skins will be corrected there by it's creators. And all this for what? Can the guy behind this change tell us, what we gained by this? I think that the answer would interest most all of DCS players... Almost everyone have Hornet and likewise everyone have some user skins. A small apology would be nice, if nothing else. No offense to anyone, but I would like to see some sorry word here for all the trebles we have with it.
-
It seems that "f18c1_number_F" is for foregin bort numbers (Kuwait, Australian, Finland, Switzerland). As can be seen on screenshot where all custom_args were set to 0.0 to enable them to show. {"f18c1_number_F", 0 ,"F18C_1_VFA-105_DIFF",false}; {"f18c1_number_F", ROUGHNESS_METALLIC ,"F18C_1_DIF_RoughMet",true}; {"f18c1_number_F", DECAL ,"132_494_Hi_bort_number_LEFT",false}; - I did put different font (the yellow one) here just for this demonstration. Flaps are defined as "f18c2_number_X" Vertical Left and Right stabilizers: "f18c2_kil_right" and "f18c2_kil_left" null

-
Both ATFLIR & LITENING pod when Auto Level Gain (ALG) button unboxed - gain should be souly manual, but because of bug, both pods are still adjusting gain auctimaticaly. ATFLIR moving sensor partialy into cloud - we can see if any targets there, unable to designate. LITENING same wrong behaviour as ATFLIR: ALG_LITENING_pod_BUG.trk ALG_ATFLIR_pod_BUG.trk
- 1 reply
-
- 1
-

-
Did you checked the 1 (hide) and 0.0 (show) at the custom_args ? Also numbers where "{"f18c1_number_F", DECAL ,"empty",true}; " is defined will not show.
-
Dont forget these lines: But honestly, I dont know what are these for? custom_args = { [27] = 1, -- Tail change of type of board number (0.0 -default USA, 0.1- ) [1000] = 0.0, -- Flaps [1001] = 1, -- Nose [1002] = 1, -- Kuwait Squadron [1003] = 1, -- Australian Squadron [1004] = 1, -- Finland Squadron [1005] = 1, -- Switzerland Squadron [1006] = 1, -- Blue Angels Jet Team }
-
Not a bug, but unfortunately the feature NOT mentioned in Changelog. The Lua code for definig bort numbers changed today. Because of that, I have many many skins broken Now it look like this: {"f18c1_number_nose_right", 0 ,"F18C_1_DIFF",false}; {"f18c1_number_nose_right", ROUGHNESS_METALLIC ,"F18C_1_DIF_RoughMet",true}; {"f18c1_number_nose_right", DECAL ,"empty",true}; {"f18c1_number_nose_left", 0 ,"F18C_1_DIFF",false}; {"f18c1_number_nose_left", ROUGHNESS_METALLIC ,"F18C_1_DIF_RoughMet",true}; {"f18c1_number_nose_left", DECAL ,"empty",true}; {"f18c1_number_F", 0 ,"F18C_1_DIFF",false}; {"f18c1_number_F", ROUGHNESS_METALLIC ,"F18C_1_DIF_RoughMet",true}; {"f18c1_number_F", DECAL ,"empty",true}; {"f18c2_number_X", 0 ,"F18C_2_DIFF",false}; {"f18c2_number_X", ROUGHNESS_METALLIC ,"F18C_2_DIF_RoughMet",true}; {"f18c2_number_X", DECAL ,"empty",true}; {"f18c2_kil_right", 0 ,"F18C_2_DIFF",false}; {"f18c2_kil_right", ROUGHNESS_METALLIC ,"F18C_2_DIF_RoughMet",true}; {"f18c2_kil_right", DECAL ,"empty",true}; {"f18c2_kil_left", 0 ,"F18C_2_DIFF",false}; {"f18c2_kil_left", ROUGHNESS_METALLIC ,"F18C_2_DIF_RoughMet",true}; {"f18c2_kil_left", DECAL ,"empty",true};
-

work in progress Improved FLIR improvement discussion
GumidekCZ replied to gmangnall's topic in Improved FLIR System
I was not suggesting use of all the physics in DCS directly. Non of user PC would handle that. But rather than to use proper physics simulations by dev team to get proper results what we should have see in our FLIRs. Level of simplification should than cover most of the variables present nowadays/ or in future DCS missions. -
work in progress Improved FLIR improvement discussion
GumidekCZ replied to gmangnall's topic in Improved FLIR System
It is really stupid idea to create FLIR textures on base of some pictures or video records. What we need is to implement some physics laws of nature into DCS. Like different materials properties of heat reflection, emission and absorbtion. Put into math the power of Sun rays during the Year and Day cycle. At the end of equation, add factors of precipitation, clouds, dust or smoke, sunny or shady side of object. Also darker matt material absorb heat much better than glossy bright paints. Small/thin objects heat up quicker than large/thick ones. Tracks of moving heavy tank warms more than light tank and much more than tires of wheeled vehicle. Everything not corresponding to above well known physics is not realistic. In DCS I'm sure this is impossible, but we can get very close to it. If Devs will not focus on pictures, but rather than to physics... than we can get reasonable FLIR simulation here. Getting FLIR image of static tank in the middle of grass field at summer noon, where you can't recognize it even if Gain and Level is adjusted is just nonsense. Speaking of Level and Gain, AT-FLIR auto Level-Gain at Hornet is still bugged since the release. It will adjust even if it's not boxed. -
As name of report says if armour plates are not equiped, the MBIENT_OCCLUSION texture is set to wrong texture, which results in not very nice shadows an all liveries in DCS. {"mi_8_tex1", AMBIENT_OCCLUSION , "mi_8_tex_1_ao", false}; mi_8_tex_1_ao.dds
-
reported S-300PS 5P58D as a slave launcher
GumidekCZ replied to Tarres's topic in Ground AI Bugs (Non-Combined Arms)
More than year, No fix, not designated as bug or commented. I have same experience with mine reported bug which are not module specific -
Any progress there behind the doors? We started flying Tomcat in 2023 with this issue still unresolved. Still unable to refuel at pitch black night because of poor refuel light.
-
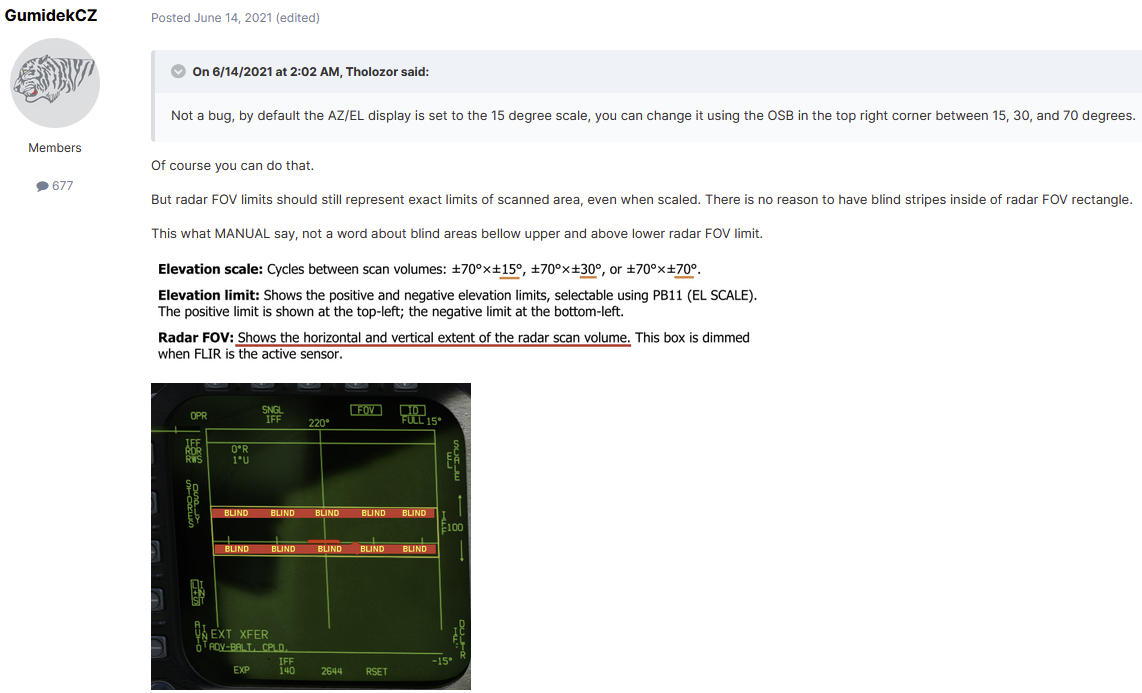
null@BIGNEWY Please, re-open this bug report. There is for 100% bug in blind evelevation areas inside of scanned box.
-
datalink shared HARM sensor with angle only, can be extremely useful when multiple datalink connected HARM equiped pilots join their angles to estimate SAM position. C2 can than create new threat track and share it on net.
-
Wide Area Surveillance In the surveillance picture, the JTIDS network perhaps plays its greatest Air-to-Air role. Each JTIDS User (JU) can report on tracks, which may be hostile, unknown, or even friendly but not on the network, The C2 unit on that given network may also have sensor or other information which can add to a given track, or contribute new tracks to the overall picture. The C2 unit and other methods work together to ensure that each physical entity is represented by only a single track on the network, and that each entity that any JU has information on is at least represented by one track. This is something like a MACRO version of what the F/A-18 has integrated for years, Multi-Sensor Integration (MSI). With MSI, the FA-18 may detect a target on the radar from long range, then the onboard Forward Looking Infrared (FLIR) may be slewed to that target. If Link 4 datalink was available from the E-2C, and the E-2C was tracking this contact, its datalinked trackfile may be displayed in the FA-18 as well, and still other sensors may be receiving information on this particular contact. MSI utilizes the mission computer in the F/A-18 to correlate these inputs from different sensors into a single trackfile if possible, creating one track that has a greater amount of known information available. With Link 4, however, often the datalinked file and the aircraft detected file would be a mile or more apart in space, and correlation was not possible. The JTIDS network using the C2 unit, correlates with much higher accuracy, ensuring greatly decreased ambiguity, and using sensors from multiple systems on mutiple air or surface vehicles, thus creating an extremely accurate and complete picture of the combat environment. Including the surface information, this is known as the Recognized Air and Surface Picture (RASP). Also included in the RASP are Surface to Air Missiles (SAMs) Surface and ground tracks, and electronic warfare information. Wide Area Surveillance will also distribute information such as points and areas of tactical significance. Source: https://trace.tennessee.edu/utk_gradthes/2266/
-
investigating SA EXP on surface designation incorrect
GumidekCZ replied to Hulkbust44's topic in Bugs and Problems
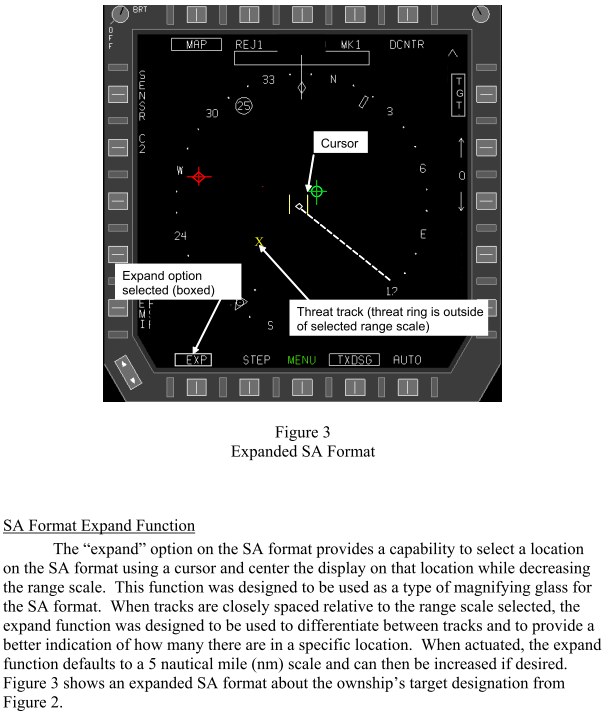
What if EXP works really only around the cursor? So the usage may be as desribed in picture - just SA page magnifying glass, which you can slew around.
-
Flight model Over Trimed if trim pressed
GumidekCZ replied to GumidekCZ's topic in Bugs and Problems
Simple question: Would any helicopter producer military or civilian implement system, which is very very frequently used and near ground (where attack helicopter mostly operate) would bring pilots near death if accidently only quick pressed? Edit: I can imagine behaviour like if quick pressed, that not all amount of cyclic offset would be accepted to the new trimmed state. But OVERTRIM? Btw., every other rotorhead in DCS will NOT overcorrect if quick pressed. May faults are there, not here -
Flight model Over Trimed if trim pressed
GumidekCZ replied to GumidekCZ's topic in Bugs and Problems
Thanks very much @Schlomo1933for your effort of explaining me things how they are right now. But still, let's keep it as a Bug, till someone from ED come up with proof that this is how it should work, even if it make no sense to behave like it is now. So for now I'm just patiently waiting. -
Flight model Overtrimed state if trim button pressed. Resulting overtrim result depends on direction and size of actual cyclic correction when trim button pressed. I can repeatable bad results when takeoff with cyclic set to stable hover possition, and than press Trim button. Also when accelerated into straight flight with cyclic set to stable bank and pitch, if trim pressed, the pitch will quickly decrease (nose down) and if near to ground and not corrected, it will result into crash. If than corrected back by cyclic and pressed trim once again, it will result in 5-10° more pitch up then was in time of trim press. So I have to do two more repeats with trim pressed and correcting overtrim, after only minor cyclic correction is needed, Im able to stabilize my flight with just minor cyclic corrections as usualy. This wrong quick trim press behaviour BUG is present now also in Black Shark 2 (probably copied from it into BS3). Ka-50_2_quick_press_overtrim.trk Ka-50_3_quick_press_overtrim.trk
-
cannot reproduce KA-50 III trim not working
GumidekCZ replied to Double4d's topic in DCS: Ka-50 Black Shark 3
I found another issue with trim: Either trim mode set in special menu will end with overtrim (almost doubled the commanded cyclic stick offset), IF TRIM BUTTON PRESSED QUICKLY. If held for more than second or two, everything goes without problem. -
Most ridiculous thing is, that all DCS street lights are HOT even during day. IR target acquisition and tracking is about size and contrast.IF Big triple od double light (not the pole) overlay the moving target, than the seeker may be stay locked on lamp, but the seeker definitely shouldn’t jump on lights when nearby. Single light street pole is not big and hot enough when compared with moving vehicle heated surfaces.
-
New Tracks with Bugged SON-9 & KS-19 Three atmpts to shot F/A-18C flying 0.8M near Bandar Abbas by KS-19 & SON-9 - I used Night / Day time and altitude of Hornets 30k and 25k. BROKEN, BROKEN and again BROKEN 1st attempt: Late radar acquisition, guns started aim, but immediately stucked in rotation around its axis without single shot. (Night, Full moon, Hronets at 30k) 2nd attmept: Late radar acquisition, guns started aim, immediately freezed not following aim on targets - without single shot. (Day, Hronets at 30k) 3nd attmept: Late radar acquisition, guns started aim, fired few rounds but quickly freezed not following aim on targets - (Day, Hronets at 25k) KS-19_not_firing_with_SON-9_Bug.trk KS-19_freezed_with_SON-9_Bug.trk KS-19_rotating_with_SON-9_Bug.trk
-
Hi there,
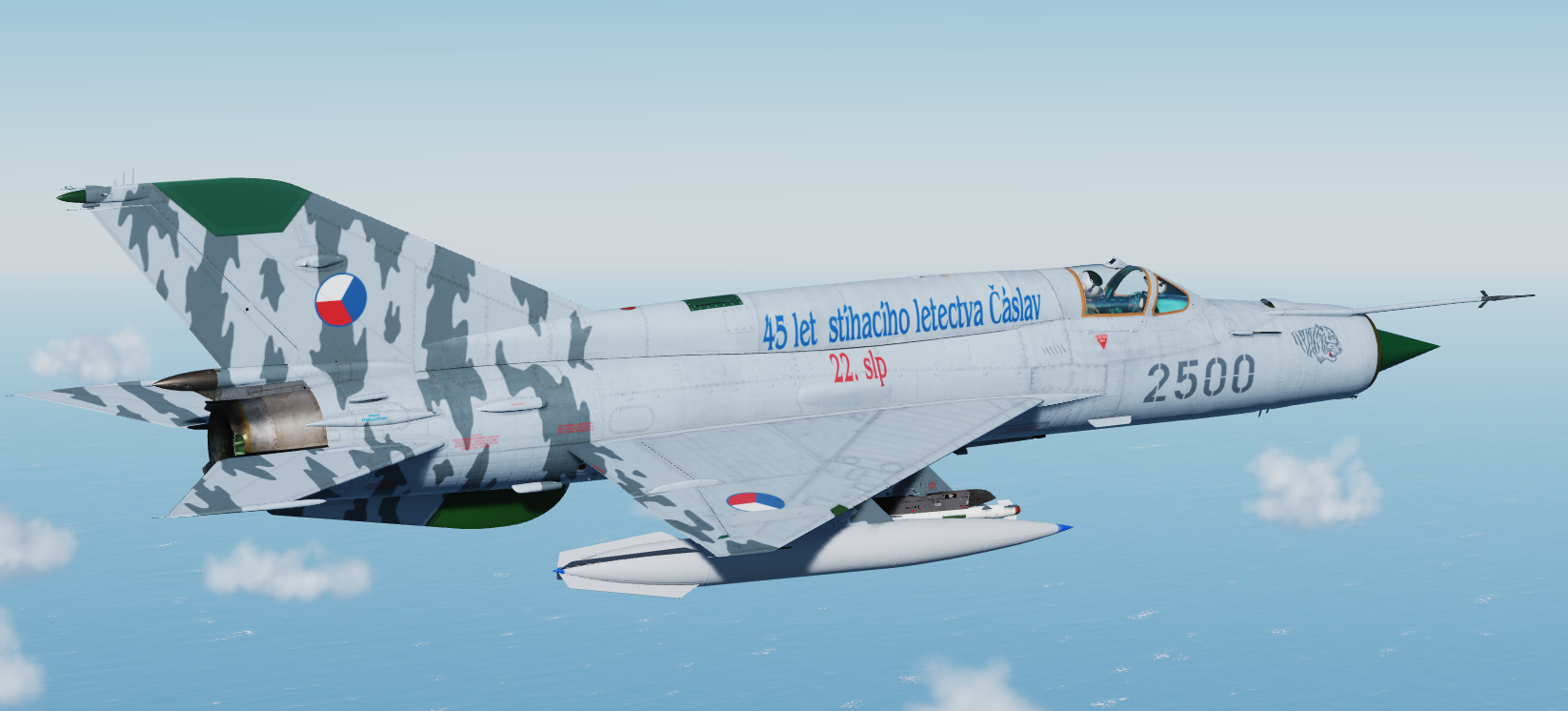
I have an offer with my Czech Mi-8 (Mi-17) liveries to be included in DCS default livery database, (based on PSD files given by @upuaut - with his approval).
my message to him:
https://forum.dcs.world/messenger/100353/?do=findComment&comment=284547Second version of Czech livery (Mi-171š) - different stenciling, slightly different camouflage colors, dark cockpit - not finished yet, can be seen here:
https://forum.dcs.world/messenger/100372/?do=findComment&comment=283424
You can see my other skins here:
https://www.digitalcombatsimulator.com/en/files/filter/user-is-gumidekcz/apply/Hi level of detail and authenticity of every stencil is guaranteed.
-
My liverys of retired Czech Air Force 9804 with his brother 9801, .... after 9801 camouflage color tint and roughmet texture correction.
-
NTTR MAP WRONG WEIRD TEXTURE COLOR TINT
GumidekCZ replied to GumidekCZ's topic in DCS: Nevada Test and Training Range
ED took any terrain color and changed it into yellowish-orange sand color. On top of that, ED wiped out textures of any sign of typical grass or bushes - according to me, NTTR map is how it should look if done by professional team. From high alt, it doesnt really matter, but at medium to ground level