DummyCatz
-
Posts
191 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by DummyCatz
-
This also poses a question about which documentation our current implementation is based on. CM-34 circa 2007 is THE only correct document for this function, and it's clearly not public. Other publicly available docs, videos, or even controlled ones like CJ-34, AM-34, etc. may not depict the correct version and therefore require SME confirmation. I guess the best possible way is to handover the question and the video to SMEs (not necessarily ED's), and hopefully they can confirm if there's any differences. Or, to dig into some public papers like DTIC to see if there's any relevant info. (maybe not this one but I find it useful for FM related issues)
-
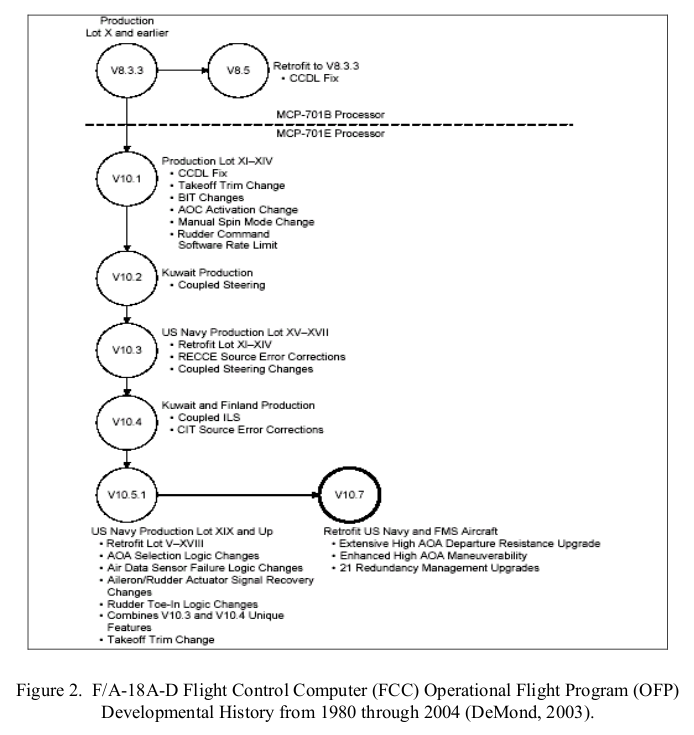
 Based on the previous statement from ED, I started to wonder if v10.7 is the correct FCC OFP now. From the above reference documents, FCC OFP v10.7 was released to the Navy and Marine Corps F/A-18A/B/C/D fleet in 2003. But as stated in the post below, we've got a circa 2002 hornet. So by the timeline, we only have FCC OFP v10.5.1. Is that correct? @NineLine
Based on the previous statement from ED, I started to wonder if v10.7 is the correct FCC OFP now. From the above reference documents, FCC OFP v10.7 was released to the Navy and Marine Corps F/A-18A/B/C/D fleet in 2003. But as stated in the post below, we've got a circa 2002 hornet. So by the timeline, we only have FCC OFP v10.5.1. Is that correct? @NineLine- 4 replies
-
- 1
-

-
- flight model
- flight control
- (and 1 more)
-
The document in question should be CM-34. Even CJ-34 is not the correct one, not to mention MLU ones. I doubt we have publicly available CM-34.
-
Yes you were correct about the pirouette logic activation criteria, my memory fails me. The current problem is that, the logic may not be correctly implemented in DCS. IRL it introduces a bias signal (sum of lateral stick and rudder that is greater than an equivalent of 3 inches*) into the sideslip feedback path, creating what is essentially a sideslip command. The sideslip feedback directly feeds to the aileron and differential stabilators, regulating the amount of adverse yaw and hence sideslip generated by the aircraft. But as elaborated in another post of mine, there's a bug in the sideslip feedback path, that feeds erroneously to the rudder. The aerodynamic implementation of adverse yaw is also questionable. Let's see how it'll get sorted out. As a result, the FCS in-game will use more rudders than expected. But yeah, it's only a problem when AOA is greater than 25 deg. *ref https://trace.tennessee.edu/utk_gradthes/2372
-
Pedal and lateral stick provide similar roll responses at around or above 25° AOA IIRC, due to the two-way interconnect between the rudder and ailerons. So you're fine with either the aileron or the rudder. BTW if above 35° AOA, the Pirouette logic will be activated by using combined pedal and lateral stick inputs. But it seems that the AOA is not that high in the demo video.
-
I'm tracking the progress of this issue that is related to the effectiveness of anti-spin controls. Seeing that in the changelog of DCS 2.9.6.57650: Fixed: Spin Recovery Mode is not working. I retested all the above tracks. Unfortunately nothing has really changed w.r.t aerodynamics. The anti-spin effectiveness is still not close to what is described as 'When anti-spin control input was applied into the direction of the spin arrows, yaw rate seemed to cease almost immediately - within 30 degrees of turn'.
-
Hi, So now in the changelog of DCS 2.9.6.57650, it is said to be: Fixed: Yaw damping inaccuracy. And I retested using the same trackfile above. Unfortunately the issue still persist. The rudder is still controlled by the sideslip feedback. Let me state it again: sideslip and sideslip rate feedback are fed to the ailerons and differential stabilators, and should not be used by the rudder.
-
correct as is Rudder roll in opposite way? bug or not a bug?
DummyCatz replied to Phil C6's topic in Bugs and Problems
There's only a few updates from v10.1 to v10.7, as indicated in the paper https://trace.tennessee.edu/utk_gradthes/2312/ and https://trace.tennessee.edu/utk_gradthes/2372/ So no, it's not related to the FCS. As discussed in the linked thread above, the opposite roll is due to the aerodynamic forces and moments created by the rudder.
-
correct as is Rudder roll in opposite way? bug or not a bug?
DummyCatz replied to Phil C6's topic in Bugs and Problems
I'd like to argue that there do exist a complete schematic diagram of the auto flaps up mode and spin mode of FCC OFP v10.1, including all the relevant gain schedules, so no guesses are required and the FCS should be coded as is. What actually require educated guesses are the powered approach mode and FCC OFP v10.7 logic updates. Check NASA TM 107601 Simulation Model of a Twin-Tail, High Performance Airplane for the block diagrams (https://ntrs.nasa.gov/api/citations/19920024293/downloads/19920024293.pdf starting from page 85) If you're wondering, no there's no such logic or interconnect that actively applies opposite roll to stop the yaw from inducing a roll, according to the block diagrams. -
reported Long lasting yaw oscillation caused by the rudder
DummyCatz replied to DummyCatz's topic in Bugs and Problems
This was to keep the track concise and on point as requested by BIGNEWY. There's already some tracks of a full mission posted by others in another thread. -
reported Long lasting yaw oscillation caused by the rudder
DummyCatz replied to DummyCatz's topic in Bugs and Problems
How does it has anything to do with startup when the mission is starting in the air? There was no failure indication of any kind. If FCS reset works then it only means the yaw-rate or sideslip feedbacks are momentarily reset to zero that stopped the FCS from overreacting. -
reported earlier Spin Recovery Mode ineffective after last updates
DummyCatz replied to Ahmed's topic in Bugs and Problems
Just some corrections based on the document you linked: The 1.5 turns means full pirouette inputs (stick and rudder to the same direction) held for 1.5 turns in order to send the aircraft into a spin, and spin arrows to be displayed, otherwise impossible due to the very effective sideslip and sideslip rate feedback of the v10.7 FCC. Spin recovery was much quicker once lateral stick was applied into the direction of the spin arrows, as yaw rate seemed to cease almost immediately - within 30 degrees of turn. The complete quote from page 22 of the document: TBH they need to fix the non-existent adverse yaw first, and then implement the v10.7 FCC features. Long way to go. -
reported earlier Spin Recovery Mode ineffective after last updates
DummyCatz replied to Ahmed's topic in Bugs and Problems
Could be related: -
I cannot find a source of your claims. From 27SK manual, m * Ny max = const = 171000kg for M < 0.85. So 9g should be available for weight < 19000kg, which equals to 171000 / 9. 171,000kg is the max allowed static force being put on the wing when M < 0.85. If you think it is 17,100kg as a weight, then you're wrong. @Skyhammer you can also try testing with a weight of 19000kg. If it does not give you 9g then the OPR g-limit mechanic is not correct.
-
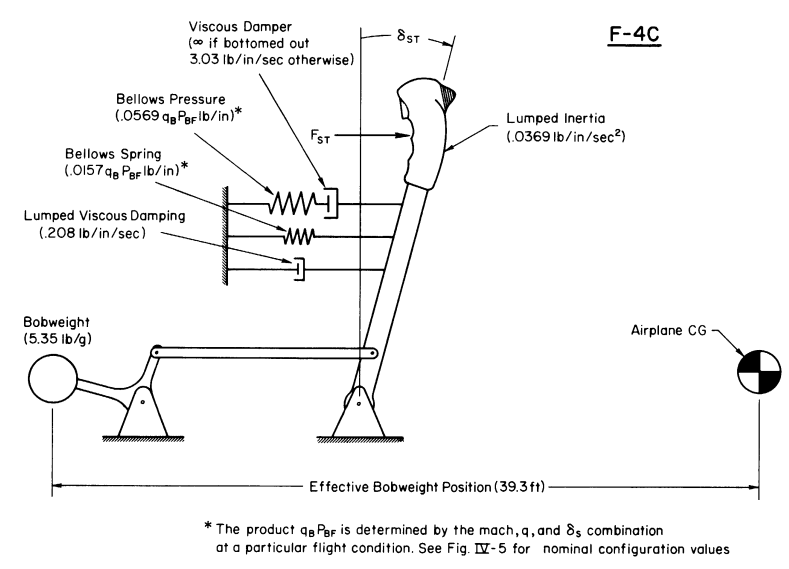
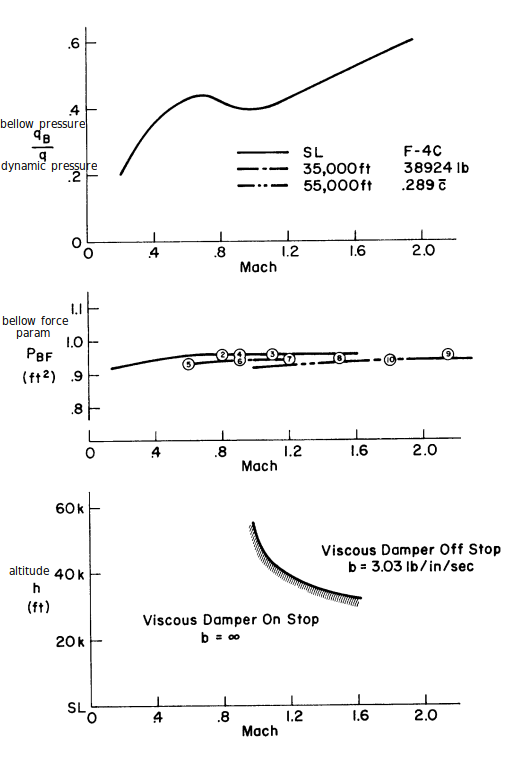
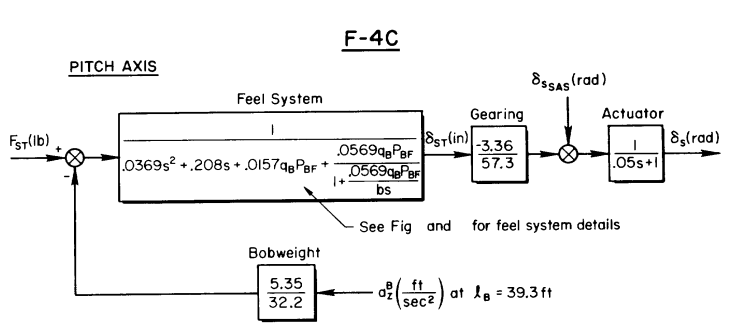
Thanks for the explanation. There're also some diagrams of the feel system from Page 65-67 of NASA CR-2144, and I'd like to know if it is correct to say that, the stick force variation is largely caused by the Bellows Spring, whose spring force (pulling the stick forward) varies based on dynamic pressure and other coefficients (like q-B and P-BF), and the Bellows Pressure creates a push force that pushes the stick back? The Bobweight seems to just function as pulling the stick forward based on normal acceleration of this object. Block diagram of the pitch feel system: Variation of parameters like q-B and P-BF:
-
[Resolved] How can we disable force feddback on the F4-E
DummyCatz replied to Midair's topic in Bugs & Problems
https://f4.manuals.heatblur.se/dcs/special_options.html I think it's not possible to completely turn off the built-in force feedback simulation by deselecting 'Stick Deflection Limit' and 'Stick Force Blending'. For example, it won't give 1:1 displacement between the virtual and real sticks. There's always some kind of additional feedback imposed on the virtual stick in cockpit. Edit: you can try setting FFB gains to 0%. -
MiG-29 all versions, Damper does not work properly at high speed!
DummyCatz replied to Irisz's topic in MiG-29 for DCS World
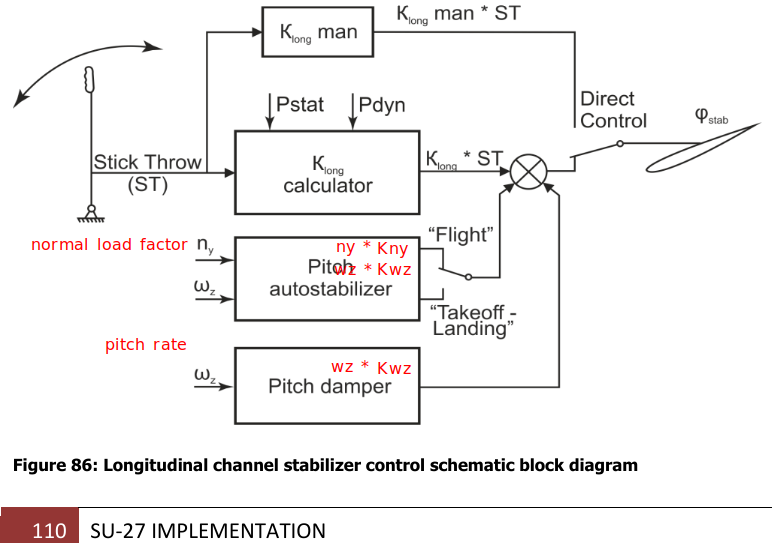
My two cents about those parameters: cs_q and cs_K are gain schedule parameters in relation to dynamic pressure (q). Take Kwz as an example, it is the pitch rate feedback gain (K as gain) that is multiplied by pitch rate (Wz), and is used as a feedback for the control system. From DCS Su-27 manual:
-
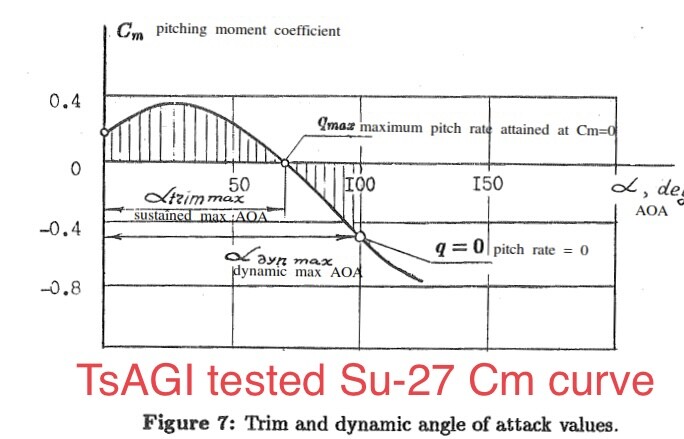
To clean up misunderstandings, I never referred to 'pitch angle' in any of my posts. Instead, it is exactly pitch-rate (denoted as q in flight dynamics) that contributes to the max attainable AoA, while Cm contributes to pitch-rate. It's all about Cm, pitch-rate and AoA, but not pitch angle. When I said 'the pitch rate culminates at around 70° AoA, as all the positive Cm accumulates to form pitch-rate', what I mean is that maximum pitch-rate (q-max) is achieved at Cm=0 in the Cm curve from the TsAGI paper, and pitch-rate can be indicated by the shaded area of positive Cm, or accumulated Cm. The TsAGI paper explained everything related to the Cobra.
-
I think with a relatively aft center of gravity, the 9.12 is possible to do a Cobra with less than 90° AoA, due to the aforementioned aerodynamic center moving forward, causing instability. Both an aft c.o.g and forward aerodynamic center contributes to a higher pitching moment. From 5:36 of the Cleveland Airshow, Rolling would normally contribute to pitch rate due to inertia coupling (explained in NASA TP1538), but in the case of J-35, the roll stopped before the initiation of pull-up, so it doesn't matter much.
-
It could be simply that uncommanded pitch-up (instability) happens earlier in the Mach number range of 0.5-0.6, at 18°-20° AoA. And at a higher altitude this is a slow enough speed for the Cobra. Otherwise the instability happens at 25° AoA, meaning a reduced max AoA. See flight characteristics section of the Draken manual. Safety concerns such as the risk of excursion into an inverted super stall, or yaw rate building up would count too.
-
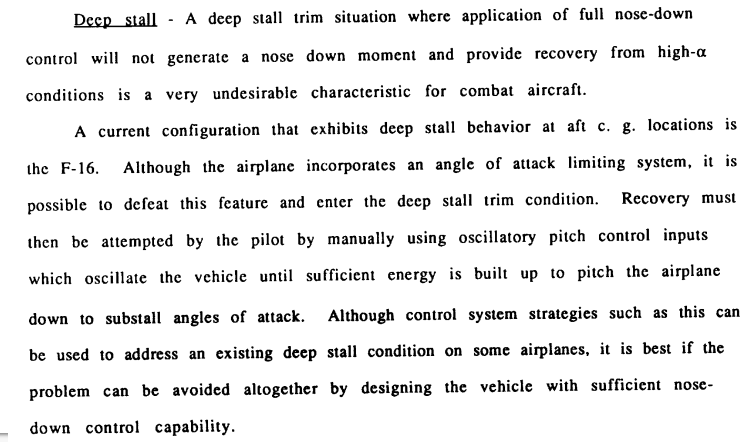
This is wrong too. The definition of stall is about CL/AoA characteristics, that the current AoA exceeds the critical AoA where CLmax is reached. While deep stall is about Cm/AoA characteristics, where insufficient nose-down control moment prevents aircraft recovery from high AOA condition. Guess why the Draken pilot has to pull back the stick and then push the stick forward to build up pitch oscillation for recovery from a stabilized deep stall at 50°-60° AoA. Definition by NASA TM 101684 (https://ntrs.nasa.gov/api/citations/19900009890/downloads/19900009890.pdf) So no, a cobra is not needed for recovery from a deep stall, but oscillatory pitch inputs. Those instructions are given in the Draken flight manual.
-
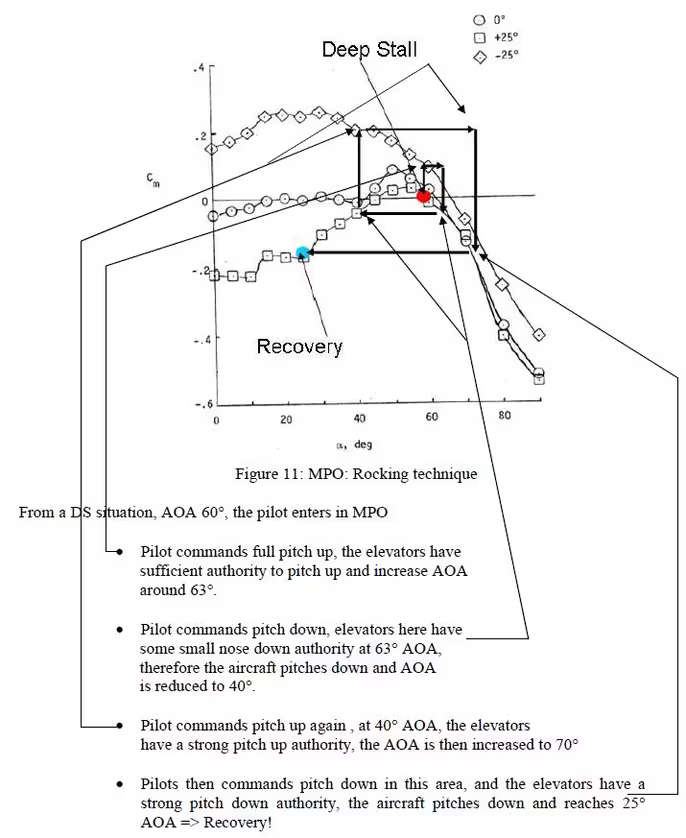
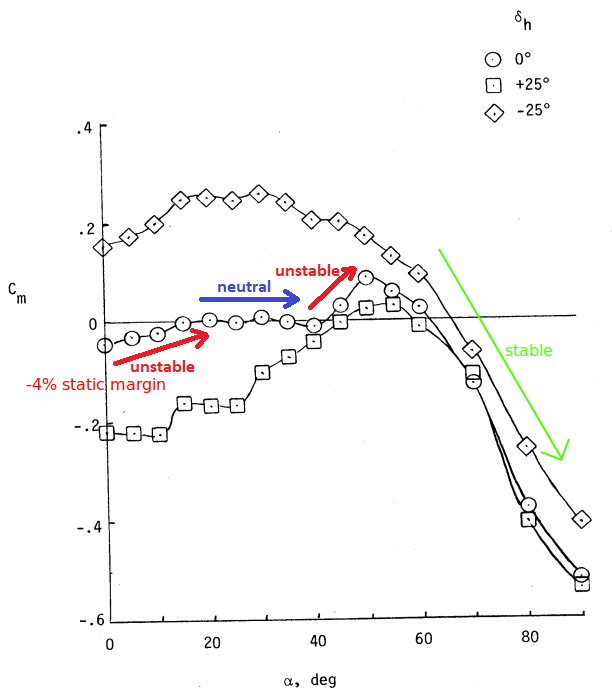
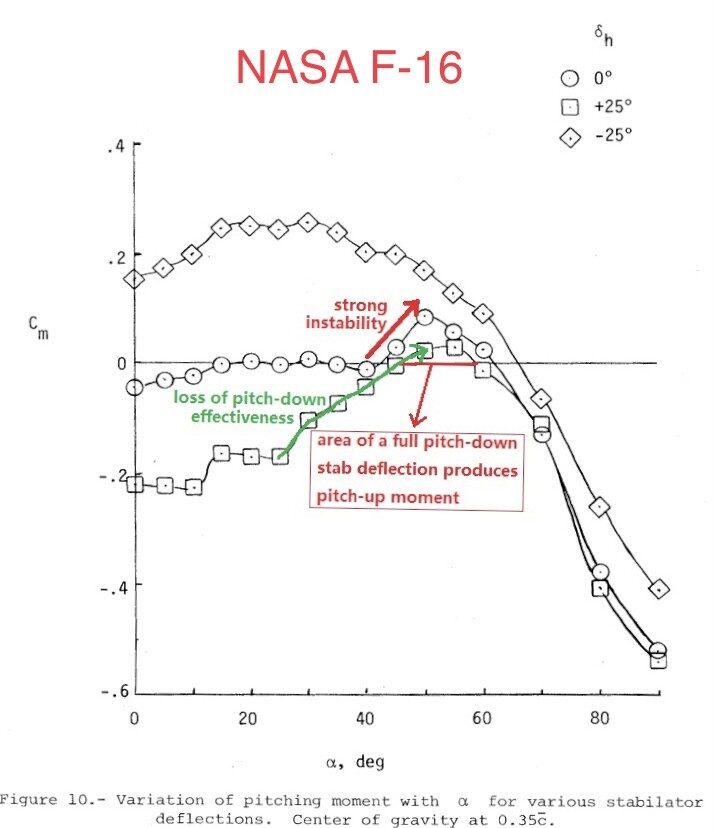
Not that simple for an F-16 to recover from a deep stall either. Search ‘pitch rocking’ in NASA TP1538 posted above, or to be concise, push stick forward when seeing pitch-down movement, and pull stick back when seeing pitch-up movement, to gradually build up pitch oscillation. This is the same technique used with Draken. (You can search for 'Flight Manual TF-35 Draken', it's a 1971 document so free from rule 1.16) The Cm curve self-explains. MPO just allows the pilot to take direct control of the stab, otherwise the FLCS will command full pitch-down above 25° AoA, which does nothing to recover the aircraft and still stabilizes in the deep stall trim point. Remember that the static margin is related to the slope of Cm curve, or δCm/δAoA. When we usually say the F-16 has a negative static margin or statically unstable, we're referring to subsonic speed at low AoA with a neutral stab, at its designed center of gravity. Static margin changes at higher AoA. From the Draken manual, the aircraft is statically unstable in pitch if AoA is greater than 25°, and can be stabilized in a deep stall trim point of 50°-60°.
-
My whole point was that the ability to perform cobra is unrelated to super stall or deep stalls, in general. It was a response to your previous statement. I’m not talking about who did cobra first. I’ll send these papers via PM, thanks. You can get them from links but not suitable to post here. You can read the paper and find out who TsAGI is, who wrote the paper. And I apologize to you that The American Institute of Aeronautics and Astronautics is not as open as Aerodynamic Institute in Warsaw. Also, the F-35 paper is written by Lockheed Martin. Nice try by questioning the credibility of those papers.
-
Not exclusive to T-shaped tail aircraft, but happens on F-16 and F-35 as well (especially the SVTOL version that has the smallest horizontal tail). It is due to Cm/AOA characteristics, not CL/AOA. Let me refer to the Cm (pitching moment coefficient) of F-16, Su-27 and F-35 to illustrate different requirements to enter a deep stall and a cobra. From https://ntrs.nasa.gov/api/citations/19800005879/downloads/19800005879.pdf As you can see with only an insignificant stab deflection, combined with the instability due to reduced static margin and loss of pitch-down control effectiveness, the aircraft can enter the deep stall region and be stuck in it. Because the nose-down control even creates positive Cm. And the positive static margin region of AOA greater than 55° allows pitch oscillation to be reduced, stranding the aircraft into a specific deep stall trim point. Similar in F-35, from https://arc.aiaa.org/doi/abs/10.2514/6.2019-3227 Eventually the F-16 developed a technique called pitch rocking to increase pitch oscillation, in order to get out of the trim point. The F-35 even have an automatic pitch rocker for this. It wouldn’t require a cobra for deep stall recovery, as the pitch rate is too significant on recovery too, that it can go over the deep stall area rather quickly. But cobra is really about how many pitch-up moment the aircraft can generate, and is particularly refering to the upper most Cm curve. Now here’s such Cm of Su-27, from TsAGI paper https://arc.aiaa.org/doi/10.2514/6.1993-4737 The pitch rate culminates at around 70° AoA, as all the positive Cm accumulates to form pitch-rate. After that the pitch-rate decreases to 0 at 100° AoA due to the pitch-down moment by the airframe. So they’re not completely related. The Su-27 doesn’t exhibit a deep stall, at least not in negative AoA.
-
Wrong. The actual 'aerodynamic phenomena' is the increase in pitching moment due to aerodynamic center moving forward at high AOA, causing a reduction in static margin, plus non-aerodynamic moments such as the rotational inertia. Super stall or deep stalls are related to insufficient pitch-down moment generated by the elevator, that the aircraft is unable to recover from it just by pushing the stick, but requires pitch rocking. Cobra is all about maximizing pitch-up moment to produce pitch rate in order to reach a higher AOA.