DummyCatz
-
Posts
191 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by DummyCatz
-
In take off and landing gains the FLCS is a pitch-rate command system below 10 degs AOA, and will hold zero pitch-rate hands off. When above 10 deg AOA, the FLCS tries to push the nose down as the AOA feedback takes part in, making the system a blended pitch-rate and AOA command system. There's some nice info over at the f-16.net forum: https://www.f-16.net/forum/viewtopic.php?f=21&t=53703
-
It's a matter of whether the g-response shaped by FLCS should follow a first-order response curve or a second-order response curve. Explained here:
-
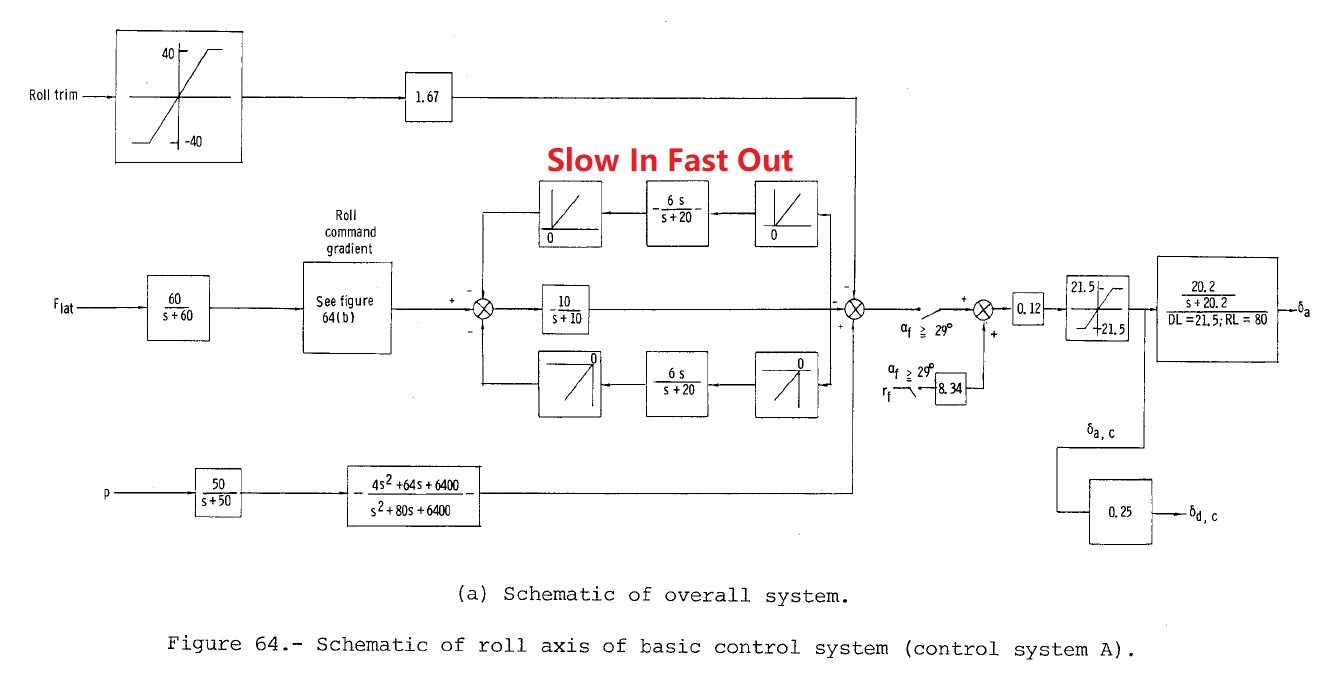
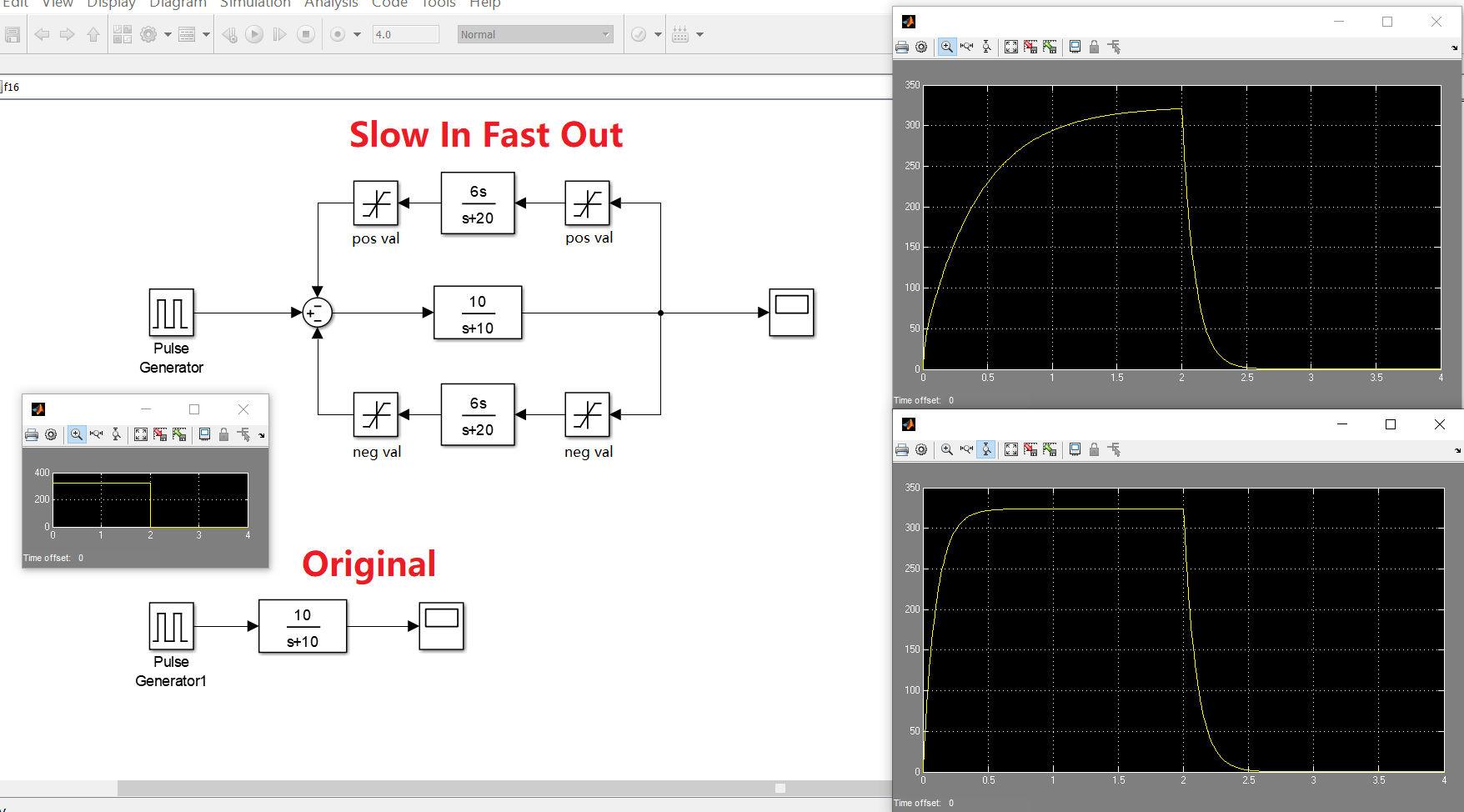
 Just by chatting with some of the guys, they refer me to NASA TP-1538 with logical diagrams. Just beware that this is a pretty old graph that may not be applicable to current-day FLCS. It's just used to illustrate the Slow In Fast Out circuit. I'm trying to explain it without touching the unintelligible side, such as lag filters and washout filters. Dial it into Matlab and make a comparison with and without such circuit: As you can see from the time response, the one with Slow In Fast Out (SIFO) circuit increases roll rate command a lot slower than the one without. It almost took it 2 seconds for the SIFO one to reach the set command value. But they both took only 0.5 sec to decrease from the commanded value to 0. I think your quote is a great explanation.
Just by chatting with some of the guys, they refer me to NASA TP-1538 with logical diagrams. Just beware that this is a pretty old graph that may not be applicable to current-day FLCS. It's just used to illustrate the Slow In Fast Out circuit. I'm trying to explain it without touching the unintelligible side, such as lag filters and washout filters. Dial it into Matlab and make a comparison with and without such circuit: As you can see from the time response, the one with Slow In Fast Out (SIFO) circuit increases roll rate command a lot slower than the one without. It almost took it 2 seconds for the SIFO one to reach the set command value. But they both took only 0.5 sec to decrease from the commanded value to 0. I think your quote is a great explanation.
-
Great findings. This is also called the Slow in Fast Out circuit by F16 FLCS engineers.
-
unable to reproduce The Viper lost its snap !
DummyCatz replied to hellking's topic in Controller Questions and Bugs
@F16FLCS-SMEI think this is where the Slow In Fast Out circuit in the roll command module comes into play, as the absolute roll rate command increases slower than it decreases. This provides rather instant stopping upon releasing the stick. Another post about the Slow In Fast Out circuit: -
correct as is Continuous (all be it slow) pitch up
DummyCatz replied to Arco's topic in Bugs and Problems
As long as it passes flying quality requirements i.a.w MIL-STD 1797A, it’s good. FBW designs differ. Try holding a pitch attitude of 25 deg, and see if the G-meter reads 0.9 G. Then release the stick and see if the aircraft pulls up to seek 1G. If your aircraft does not pitch up but instead holding 0.9G, then it’s not like the F-16 at all. -
correct as is Continuous (all be it slow) pitch up
DummyCatz replied to Arco's topic in Bugs and Problems
That's true and is the case for F15, F16 and F18 to name a few. For any flight with pitch angle not at 0°, a slight push of stick is required to maintain that pitch angle. This is most noticeable when flying at a higher pitch. It's subject to the sensitivity of normal accelerometer, that if it's able to sense that tiny amount of acceleration increments. And also affected by other control logic designs, such as the pitch-rate dampening logic, that if it's strong enough to suppress the pitch up. There's some design I know of that do help to stabilise the FPM within a small amount of normal acceleration, so that a true 1g level flight can be achieved. Some makes pitch and roll angle compensations to normal acceleration, so that the aircraft can hold the pitch when pitch or roll angle is not at 0°. The EF-2000 for example even uses pitch-rate command when the stick is neutral, and gradually changes to g-command at a max stick input. -
correct as is Continuous (all be it slow) pitch up
DummyCatz replied to Arco's topic in Bugs and Problems
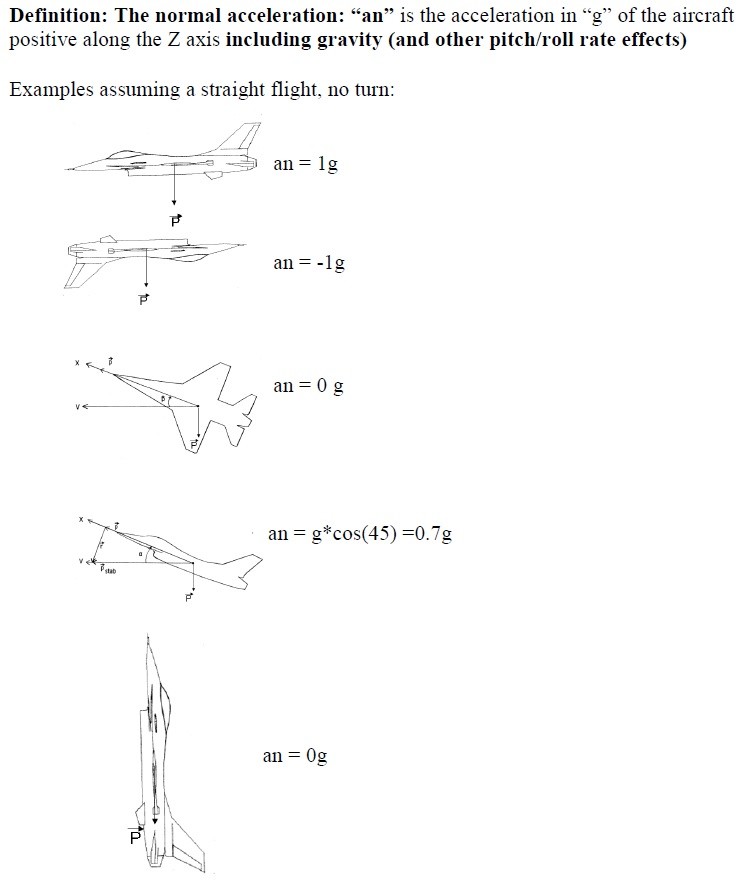
Ideally it should be the cosine if 2°. It measures body frame acceleration. An indirect proof would be from -1, where it states that it's approximately 1g or -1g for upright and inverted deep stalls, respectively. A direct proof would be from the definition of normal acceleration or normal load factor itself, that the FLCS explicitly uses as feedback. -
correct as is Continuous (all be it slow) pitch up
DummyCatz replied to Arco's topic in Bugs and Problems
If the former is the case, then a reschedule of the AOA limiter and g-command module of F-16 FLCS is required. For example the current AOA limiter will reduce commanded g to 1g at 25.X deg AOA, what would be the actual AOA limit in this case? -
correct as is Continuous (all be it slow) pitch up
DummyCatz replied to Arco's topic in Bugs and Problems
Quick question, if you put an F-16 on the Moon, let's say on a level ground, what would be the G meter display on the HUD? If it can even fly straight and level, will it pitch up? -
correct as is Continuous (all be it slow) pitch up
DummyCatz replied to Arco's topic in Bugs and Problems
I think I'm gonna save BIGNEWY on this one. The main feedback being used in cruise gains is normal acceleration, often denoted as 'Nz', sometimes 'an'. When flying straight with no bank angle, the normal acceleration of the aircraft would be cosine(pitch angle). So only when the pitch angle equals to 0, the normal acceleration is 1g. Otherwise the normal acceleration will be less than 1g when flying straight at a certain pitch angle, and the aircraft will pull up to reach 1g. This behaviour can be observed on any aircraft that seeks 1g with hands off. However if you put your gear down or open the AR door, the normal acceleration feedback is replaced by pitch rate feedback, and the aircraft will hold zero pitch rate hands-off at below 400 kts.
-
I can't think of any hard proof right now, maybe it's necessary to ask the pilots. But I've been told by the FLCS maintainer that the pitch FLCS, especially the g-command system of an F-16 is a first-order system. The response, and in this case the g-response, of such system should follow a first-order response curve, like below: There're several typical flight control designs that deploys a first-order system, such as the Jas-39. You can find the exact same flight tested g-response curve in the paper CAREFREE MANOEUVRING AND AUTOMATIC RETURN TO NORMAL FLIGHT ENVELOPE JAS 39 GRIPEN https://www.sciencedirect.com/science/article/pii/S1474667015332274 What is shown in your video and in DCS is seems to be a second-order oscillatory response. Just my thoughts.
-
correct as is Strange Ground Radar behaviour while zooming in
DummyCatz replied to AlexPlorateur's topic in Bugs and Problems
In OP's video it does seems to be the scanning speed of radar beam, which is indicated by a 'T' symbol at the bottom of the page, decreases as the Scan Width setting goes from A6 to A3 to A1. Here's an IRL footage of DBS2 mode under A6 setting and you can check the scanning speed and cursor movements: (from 0:36) -
unable to reproduce The Viper lost its snap !
DummyCatz replied to hellking's topic in Controller Questions and Bugs
This video shows a 4-point roll with a HUD footage as well as from a ground viewpoint. You can try matching the parameters in the video and see if the same level of snappiness can be achieved: (from 6:24) -
If I'm not wrong that's the g-command gradient curve. It does not translate to how much elevator deflection you can get, but how much Gs you want to command, especially in the air. By the look of the curve, with 32lbs stick force (=30.25+1.75 breakout), you're sending out a 11.86g command (=10.86g + a constant 1.0g). This is later limited to 9Gs, which means the 9G to 11.86G section of g-command gradient is not usable. Try it in the air to see if you can pull 9Gs with only 78% stick travel, when the aircraft have sufficient energy. With gear down the gain is different. BTW the roll curve seems to be a simplified one. Ref https://www.f-16.net/forum/viewtopic.php?f=2&t=58462
-
Hi, I just came across the following bug report before the FM/FLCS was tuned, and it still persists, if it's considered a bug. I've recorded a new track file and hope it can help. F16 FLCS pulls up at the end of a roll.trk Description: Just as the OP described, after performing a 360 deg aileron roll, and as soon as the rolling motion stops, the FLCS will always pulls up itself a few degrees of pitch. Looks like a pitch dampening issue or a pitch stability issue. Expected: The pitch-rate washout filter should be able to suppress such uncommanded pitch-up motion, if supposedly caused by inertia coupling (or not, since the AOA is so small, there shouldn't be such amount of pitch up moment). Extra info: The pitch-rate washout filter is described below in another post. If anything to add: the time constant for such washout filter is 1, and the gain is 0.334, which should be sufficient to suppress the uncommanded pitch up. Extra extra info: The overall pitch dynamic stability seems to have been reduced with the introduction of the previous g-onset fix, might be related. Forgive me on so many bug reports related to FM. I'm just showing my effort on making the Viper a better module as we all wish. And this subject of matter is no easy task, so keep up the good work. Please recognize that this is already an excellent FM update. Kindly regards, DummyCat's pigeon gugugu squadron.
-
Thanks Akiazusa san, indeed there’s some nice info in there. To ED, The post-stall characteristic and the FLCS interaction is a bit tricky by nature, so take your time. I only issue bug reports with the hope of a better Viper module as we all did, so don’t b intimidated by all the issues here. Keep up the good work. Regards.
- 11 replies
-
- 3
-

-
- investigating
- flcs
- (and 1 more)
-
Exactly.
-
It’s a term in the control system: https://mathworks.com/help/physmod/sps/ref/washoutdiscreteorcontinuous.html https://aviation.stackexchange.com/questions/51106/what-is-an-autopilot-washout-filter They are not quite compounded. One is related to the rudder reaction to yaw rate, and the other is related to the stabilizer reaction to pitch rate.
-
I actually tried to reach out for some help from a FLCS maintainer who knows the inner logic or functions of the digital FLCS, he replied that there's no logic change in the pitch axis during a departure unless you held the MPO to OVRD position. The MPO override basically nulls the AOA feedback and also nulls the integrator, allowing the pilot to make full use of the stabilizer to rock the aircraft out of a deep stall. Otherwise the stabilizer would be kept at the full deflection state due to AOA feedback. But the (washed-out) pitch rate feedback plus the Nz feedback is active full-time in cruise gains (gear up mode), regardless of MPO switch position. It is not the same pitch rate feedback for landing mode, but a washed-out one. It filters out the rate of change in pitch-rate and can be considered a derivative component.
- 11 replies
-
- 1
-
-
- investigating
- flcs
- (and 1 more)
-
Let me make an update on my observations. This bug actually appears when the aircraft is rapidly pitching down from a very high AOA, down to the normal AOA range of -5 to 25 degrees. Now the FLCS should resume normal flying logic, and in this situation, the FLCS should be given a negative pitch rate feedback, in that the aircraft is rapidly pitching down, and at the mean time the Nz is also less than 1g. As a result, the horizontal stab should start to counter the pitch-down motion. But it doesn't. In the contrary, the stab keeps at the trailing edge down position and drives the aircraft to negative AOA. There's no sign that the stab wants to deflect trailing edge up during the continuous pitch-down motion. Track is attached and it should be a lot more concise than the one in OP. This time I'm not using the MPO to force a negative AOA departure, but to use the inertia coupling maneuver to force a positive AOA overshoot. F16 FLCS forcing nose down.trk
- 11 replies
-
- 2
-
-
- investigating
- flcs
- (and 1 more)
-
investigating High Speed Yaw Stability/Departure
DummyCatz replied to ShadowFrost's topic in Bugs and Problems
I'm trying to analyse what happened in this departure. Initially there's a rapid overshooting of AOA limit due to the inertia coupling maneuver, which I described in another post. The inertia coupling phenomena is real so it may not be a bug that caused an overshoot. The FLCS do have some protections against inertia coupling so it depends on the implementation of both FLCS and aerodynamics. After the aircraft departed from controlled flight, the rudder is not trying to counter yaw rate, but to enhance it. That's why you can see all kinds of yaw motions happened there. (See the yaw rate limiter bug below) Then there's a bit of random pitch up and down due to the relaxed static stability characteristics of the aircraft. There's a chance of throwing the aircraft into a deep stall trim point and stuck there, which is around +/- 60 deg AOA, in both positive and negative AOA region, due to the stalling/overshadowing of the horizontal stab. You can check the pitching moment coefficient curve in this blog for better understanding: https://web.archive.org/web/20090627050146/http://www.codeonemagazine.com/archives/1986/articles/july_86/deep_stalls/index.html In the last bit of the departure motion, something weird happened when the aircraft suddenly backflips from positive AOA to negative AOA, which led me into issuing a bug report: By looking closely at the horizontal stab position in relation to the pitch rate of the aircraft, it is exactly the horizontal stab that drives the aircraft into the negative AOA. It deflects trailing edge down even when the pitch rate is negative (pitch-down motion). Both issues are reported. Hope it helps. -
Hi, Considering the on-going FLCS tuning and aircraft stability issues, I for one wish for a white paper on specifically the FLCS and aircraft stability & control quality, in order to make more people aware of how the aircraft should response to their control input, and how all the functions in FLCS are utilised to improve the controllability & stability of the aircraft, making the aircraft stay within the limit and not departing it, etc. Thanks.
-
- 6
-
-
Hi, When flying with my squadron these days I noticed yet another newly introduced bug that is not related to inertia coupling or the yaw rate limiter. It seems like a pure pitch FLCS issue and not an aerodynamic issue. Description of situation: After the aircraft is departed from controlled flight, the FLCS tends to command pitch-down by driving the horizontal stab to the trailing edge down position, during pitch-down motion in negative AOA. This is quite weird since the FLCS is supposed to command nose-up in the case of a pitch-down motion, as it is receiving a negative pitch rate feedback. This looks like the FLCS deliberately pushes the nose down and increases the pitch rate while in the negative AOA, which could result in a backflip. Testing Method: Use the MPO to force a departure and then return the MPO to NORM. Watch the horizontal stab reaction to pitch-rate and AOA. I've highlighted the issue with slow motion in the track file. Expected: The FLCS should not try to deliberately increase the pitch rate but to reduce it. F16 FLCS caused backflips.trk
-
Thanks for the insight. So it sounds like there's some kind of transition state in-between that would help alleviating/removing the jerkiness when the FTR button is held down, as in the current DCS implementation? Another question is about the above mentioned Heading Hold. I remember you mentioned that the heading hold function is active all the time even if Hold Modes are not active. And when the pilot starts kicking the rudder above the dead zone, the heading hold momentarily disables to allow a heading change. So the moment when heading hold disables, does the SCAS also provide a smooth transition, or does it has the jerkiness like currently in DCS?