Rifter
-
Posts
217 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by Rifter
-
Start of my flight career on the ZX81 1982 - no high res graphics, not even colours. Literally flying by numbers!
-
Yes, they link to Meta and their Asynchronous Spacewarp 2.0 (quite old by now) to make clear that creating additional frames in VR is job of the VR software stack and not of Nvidia. Which makes totally sense since Nvidia happily leaves it to the VR headset makers to handle those silly and erratic user head movements for temporal reprojection. What I read in your source: Nvidia ’Optical Flow’ functionality has been heavily optimised, which means: All motion reprojection done within the VR software (which always relied on optical flow estimation) now gets even better. Good news! But nothing new here technology wise and no whatsoever reference to DLSS3. What I don’t read: We can expect to leave behind the VR software stack (Oculus, SteamVR, …) in favour of Nvidia DLSS3 as an alternative for VR motion reprojection to lead us all into the promised land of high VR frame rates by having Nvidia unfold its magic for extrapolated VR frames without getting a latency price tag on it.
-
VR motion reprojection is a ‘forward looking’ motion estimation method. It needs the video encoder block of the GPU to do so. Since motion reprojection is done asynchronously (in parallel to the application) it has no impact on CPU or GPU tasks. Hence the Oculus/Meta expression 'Asynchronous Space Warp'. It is until today the best method of creating additional frames for VR with repect to latency. DLSS3 is a ‘backwards looking’ interpolation method which creates significantly increased latency. I lack the imagination how that could be compensated. Spatial reprojection is for sure no solution because that won’t work for longer time periods. DLSS3 is only for pancake.
-
Gabby Drake talks about the 3 levels/modes of the F-16C radar on 10 percent true (At time stamp 1:13:00): According to Gabby in wartime level 3 the radar get’s pretty intuitive, it will do it’s magic and the pilot will be the recipient. Sounds exactly like the mode I need. Honestly - I’m too lazy to dig this up in the manual. Can someone quickly post the 4-digit code for operating the radar in wartime level 3? Thanks in advance!
- 1 reply
-
- 1
-

-
Ergänzend zu dem, was bereits geschrieben wurde: Die Ausmusterung der MiG-29 war keine einfache kategorische Entscheidung gegen das Muster. Es gab damals im Vorfeld durchaus Planspiele, die einen Verbleib der Maschinen in der Luftwaffe vorsahen, z.B. durch den Erwerb weiterer Flugzeuge, um auf eine sinnvolle Gesamtzahl zu kommen, die aus Sicht Wartung und Logistik eben auch erforderlich gewesen wäre. Darüberhinaus entsprach die MiG-29 von ihrer Lebensdauer her (2.500h) auch nicht ganz dem, was in der NATO üblich war. Die MiG-29 war aus Fatique-Sicht dementsprechend ein Sorgenkind. Die Luftwaffen-Exemplare hatten allesamt Risse an den Wurzeln der beiden Seitenleitwerken. Nach jeder harten Ladung war die Kiste in der Maintenance, weil der Anbindungsbereich des Fahrwerks in der Struktur unterdimensioniert war. Solange der zentrale Zusatztank nicht leer war, durften 4 G nicht überschritten werden. Oberhalb von Mach 0.8 (oder 0.85, weiss ich nicht mehr genau) waren 7 G das Limit. Die russischen Angaben zur 9.12er (Fulcrum A), nachdem der Airframe 12 G abkönnen hätte sollen, waren gelinde gesagt, euphemistisch. Eine Modernisierung der MiG-29 wäre pure Geldverschwendung gewesen, aber zum Thema Modernisierung/Weiterentwicklung ist dennoch interessant: In die MiG-35 ist so einiges an Verbesserungen eingeflossen, was in westlichen Evaluierungen an Kritik bei der MiG-29 aufkam (die Infos kamen ja gratis, da der Westen dazu alles großzügig veröffentlicht hatte).
-
What staggered me are the geometrically distorted side panels in VR. Some of the gauges are even oval!? I don’t get the point of that. Is that an optimization for 2D screen representation for better readability? It is obvious that a lot of love went into that cockpit modelling. Hoping for a little love for VR users too. Would be a shame if that gorgeous work on the cockpit would only be meant for pancake displays.
-
Not a bug - you just picked the included QF-4 variant by mistake.
-
For sim racing the sun shines bright when it comes to motion platforms: With a 4-DOF system you are well equipped to get a lot of useful immersion, because you are able to interpret the wheel load of each of your (virtual) wheels and also the composition of the road surface. Add belt tensioners for even more immersion. And the software was optimised over years simply because sim racing has a bigger user base as flight sims. First problem you have to solve concerning a motion platform for a flight sim is your expectation. Second problem is the motion software itself respectively your settings. I use a simple 2-DOF seat mover for DCS. Main problem from the very beginning were the aracadish default settings. Why would you want your motion platform to tilt sideways synchronous to the roll manoeuvers of the aircraft? In a coordinated flight there are no lateral forces on the pilot. Why would you want your platform to pitch accordingly to your climb and sink? In an accelerated dive (nose down attitude) the pitch down movement creates the wrong feeling of a decelerating aircraft. When I started to emphasis the vertical G-force (as the main force felt during a flight) in my settings, things became interesting. I maxed out the pitch and roll impulse (intermittent pitch and roll) and set sustained pitch and roll to zero. Suddenly the rather limited possibilities of the 2-DOF platform created a lot immersion. Of course you can’t get G-forces. But in VR the directional force impulse fools the brain in a fascinating way.
-

VSN F/A-18D Hornet with F/A-18C Cockpit
Rifter replied to josh-109's topic in Flyable/Drivable Mods for DCS World
Thanks a lot for your ongoing work on this mod, josh-109. I appreciate it! Actually I prefer it over the Super Hornet Mods since the F/A-18D is a kind of a F/A-18C with a new skin. The real F/A-18D has some rearranged avionics and around 6% less fuel capacity. Of course the second seat is not a thing in this mod but flying it solo with the C-model as a flight model base and it's cockpit is absolutely realistic in terms of flight behaviour and aircraft usage. You just have to reduce your max internal fuel load to 94% and your good to go. -
From the way how DLSS3 is working I doubt that it will ever be a reasonable method for VR. Since DLSS3 is not “looking forward” as all VR reprojection approaches do for the motion estimation, but rather “looks backwards”, DLSS3 is not able to create additional frames without a significant latency increase. Which again is exactly what nobody wants for VR in a flightsim.
-
Well, for some people reprojection performance is the one and only decision factor. My 6900 XT was not working well in VR - so I switched to a 3090. Although I would have loved to be able to use the 6900 for several reasons. The big question is: Did AMD crank up the video decoder performance for the 7xxx-generation or not. That alone determines the VR reprojection performance because motion estimation relies on video decoder functionality. And rumours say that Nvidia 30xx cards have a performance advantage by the factor of 2 to 3 over AMD 6xxx cards regarding the video decoder.
-
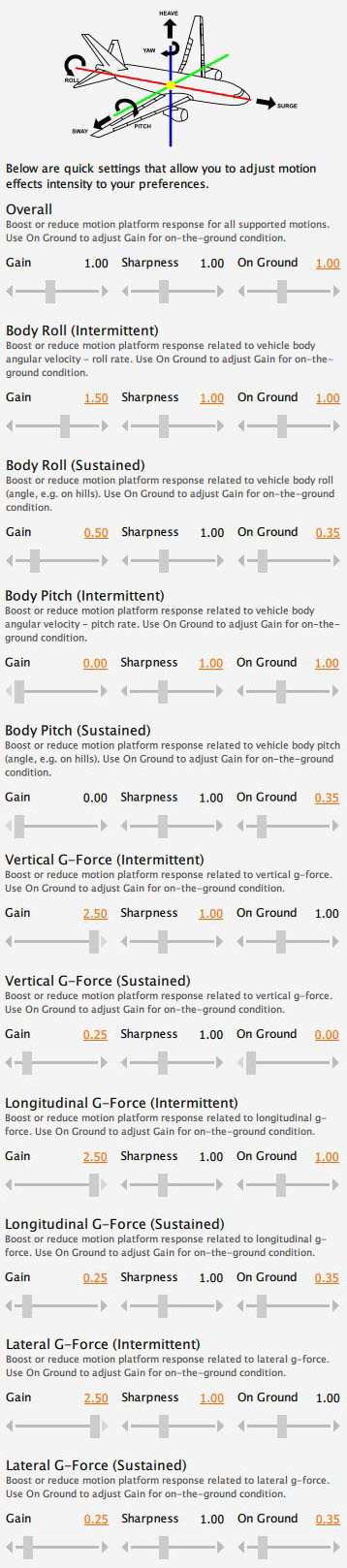
NEXT LEVEL MOTION PLATFORM V3
Rifter replied to lasvideo's topic in PC Hardware and Related Software
Recently there was a change for the profile format in the Platform Manager software. Also the script files for DCS were rewritten. In my opinion this brought the motion platform V3 a big step forward. I tried to create a new profile using the new possibilities of the profile input parameters (for example it is now possible to set the effects on the ground independently from flight manoeuvers, also it is finally possible to have longitudinal forces). Perhaps this is useful for some V3 owners. Hence I only fly in VR so I don’t know wether my profile is also good for pancake flying. I attached screenshots of my settings. Perhaps some words on my general approach for those who are interested: The default settings of the motion platform V3 for DCS always seemed a little arcade-style to me. Some people even got the wrong impression that a 2-DOF platform with only 10 degree of pitch and roll is of no use for a flight simulator. But that is not true - you can get amazing effects out of such a platform. Every motion platform provides a kind of motion budget which has to be spend wisely. Often you have to decide what is important for you because putting every effect into it can easily lead to a masking effect (one effect gets masked by another one with the result of not being able to have the desired feedback). Tilting a motion platform sideways synchronous to the roll manoeuvers of the aircraft doesn’t make sense to me, since in a coordinated flight there are no lateral forces on the pilot. Only in special situations there a lateral forces (barrel roll, landing with turbulence, etc.). So it is better to keep your side tilt budget for that stuff. For the motion platform V3 there is a certain backlash effect when creating a violent roll impulse which I compensate with a certain amount of sustained roll. So i use sustained roll only as a kind of expedient. I also always set the sustained body pitch parameters to zero because I don’t see the value of a pitching plane as feedback. Especially when taking into account a case like an accelerated dive (nose down attitude) were the pitching platform creates the wrong feeling of a decelerating aircraft. I always try to emphasis the vertical G-force since that is the main force felt during a flight. Therefore I like to max out the pitch impulse (intermittent pitch). Sustained pitching the motion platform on ground manoeuvers is helpful for breaking and accelerating effects however. Also for ground acceleration keep in mind that a jet can’t accelerate beyond around 1G with the power of his engines. On the catapult you can reach around 3G and in the air of course up to 9G and more. So it is a good idea to keep ground forces at a fraction of the possible range of the motion platform to have a good ratio between a normal start, a cat shot or a dogfight manoever. You won’t get any G’s anyway - it’s all about creating short impulse forces in a certain degree and not sustained forces. One last thing: Make use of the post processing modifiers of the Platform Manager!!! I use it for smooting out roll and for violating pitch.
-
solved FFB stopped working in the Huey since 2.8?
Rifter replied to Rifter's topic in Bugs and Problems
Yes my friend - I checked force trim. As a good virtual pilot I always check my cockpit settings. Unfortunately I’m not as thorough with my DCS settings under MISC. With the new DCS version those settings were defaulted. @BIGNEWY: Problem found - it was between keyboard and chair. Please remove the topic and block my write access to the forum for the next 2 weeks...no, better 4 weeks. This is so embarrassing…- 6 replies
-
- 3
-
-
- force feedback
- ffb
- (and 1 more)
-
Am I the only one with non-working FFB (Sidewinder 2) since the arrival of 2.8? I checked with older DCS versions to make sure the problem is not on my hardware side. But FFB works fine with former versions.
-
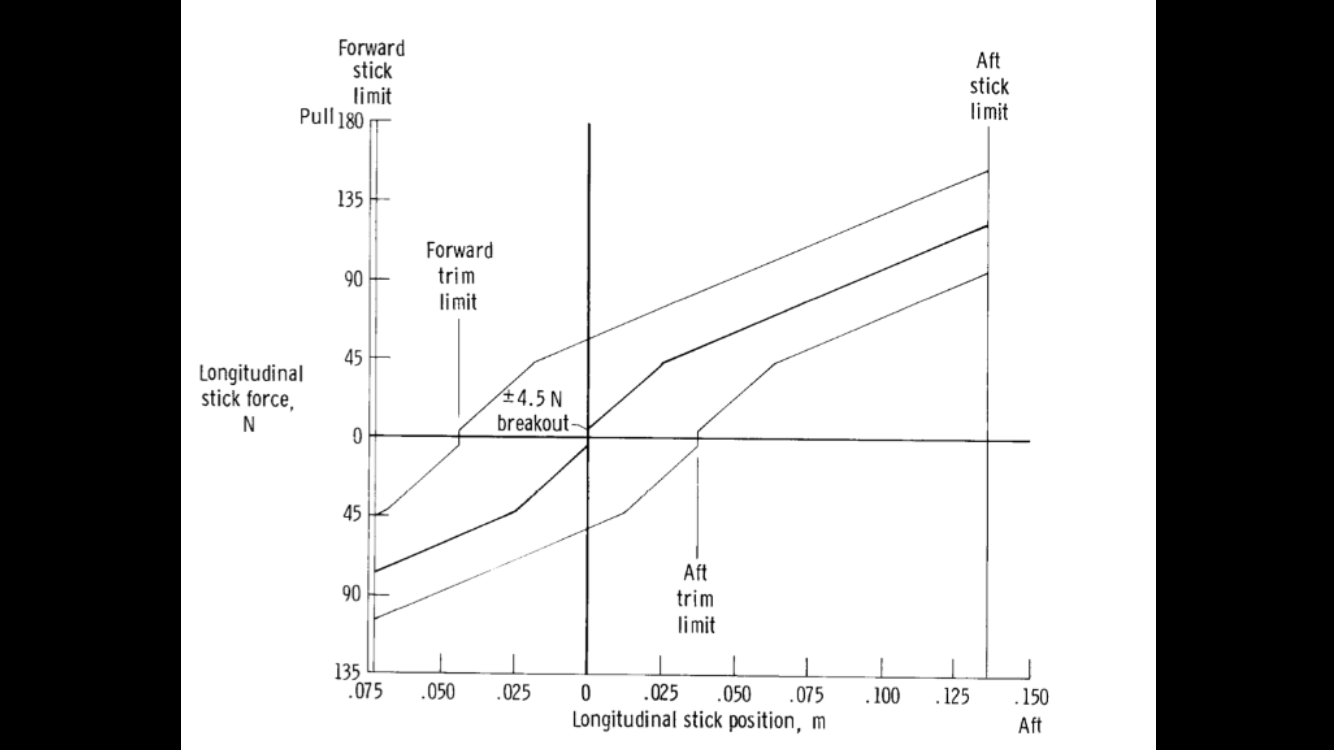
Force to be applied on the stick of real fighter
Rifter replied to lricca's topic in Military and Aviation
Perhaps the stickforces for an F-15 gives you an impression.
-
Im Grunde genommen kann die CV1 und Rift S auch ganz ohne Verbindung zu Meta betrieben werden. Sinnvolle Software-Updates für die beiden Brillen sind sowieso nicht mehr zu erwarten. Ich selbst habe aus Performance-Gründen meine Rift S schon vor geraumer zurückgerollt auf eine uralte Oculus-Runtime und dazugehörige Firmware. Dazu habe ich in der Hosts-Datei alle Verbindungen zu Oculus bzw. Meta gekappt. Funktioniert einwandfrei. Man kann sogar auf einem neuen Rechner alles wieder installieren ohne jegliche Verbindung zu Oculus/Meta. Meine Rift S ist so gesehen jetzt ein Standalone-Gerät.
-
Well, the Bo 105 is not generally approved for aerobatics. Only the Red Bull Bo 105’s are officially approved for aerobatics (2 in the US and 2 in Europe). What Red Bull never talks about: That comes with horrendous safety requirements. There is an incredible high acceleration factor of 100 for the part swap of several hard time parts. So for example, if the regular exchange interval for a hard time part is 1000 flight hours then in the Red Bull helicopters it has to be swapped after already 10 flight hours. Since the Bo 105 is a legacy model, the market for spare parts is shrinking. And those Red Bull helicopters are eating up the remaining spare parts in a frightening speed and will probably have an impact on the remaining service time of all other Bo 105’s on the world.
-
Not really. No helicopter can fly sustained inverted because of the asymmetrical collective range. Some RC model helicopters can do when they have a symmetrical range on the collective. When flying a role or a looping in a helicopter the pilot has to use the impulse of movement to fly the helicopter through the part where it has no lift. Actually every helicopter will definitely lose hight when in inverted position so no helicopter (also not the BO-105) can fly a role without losing a reasonable amount of hight. I had the privilege to see the beginning of BO-105 aerobatics when pilots like Charly Zimmermann of the Bundeswehr started to pull off the first loopings. They were by far not as refined as we know it from the Red Bull team today. On average from 5 attempted loops only 3 worked. In the remaining 2 cases the helicopter just fell out of the sky and the pilot had to regain control on his way to earth. As every helicopter the BO-105 is not an aerobatic machine by nature. It seems that the BO-105 just proved to be quite robust and good-natured in undesirable flight conditions compared to other helicopters and therefore created enough confidence for the pilot that he has some safety margin when things go wrong . Although the cracks in the rotor blades showing up soon after the aerobatic madness started proved that the BO-105 was just an ordinary mortal machine as any other helicopter. The chief pilot of Salzburg Red Bull helicopter team Siegfried "Blacky" Schwarz once said: A helicopter does not want to fly aerobatics - in contrast to a fixed wing aerobatic plane you will always need brute force to do so in a helicopter. Little known fun fact: The CH-53 displayed a looping when it was first presented to the public. As long as a helicopter doesn’t have a semi-rigid teetering rotorhead system (like the Huey) it will be able to fly roles and loopings - at least in theory. Practically it is not advisable.
-
I made some testing last year. Possible influencing factor for stuttering / spiking frame times on new gpu generation On my side undervolting indeed helped to smoothen out the frame times.
-
The correct technical term is wobbly air data probe doodad. https://rochesteravionicarchives.co.uk/collection/air-data/helicopter-air-data-probe
-
Ok - false alarm on my side. In my first quick test I only hit around 80 knots. Did another test (see track) were I accelerated to over 100 knots. Flight is only over runway so there is a good reference from outside top view. Crabs like hell when complying to the ball, calming down at around 80 knots. Nothing changed - ignore my preceding comments and sorry for the confusion. uh-1_crab.trk
-
Since I had no doubt in the past about the flight ball in the Huey being off, why should I read the thread again? Discussions about complying with the flight ball leading to an exaggerated crab flight date back to 2019 and I was one of those who asked for a fix. I just did a quick test yesterday and found, that suddenly the Huey in contrast to the last three years was no longer in crab flight when complying with the flight ball. It felt like pre 2019. I needed some left pedal for a nose-to-tail trim and the flight ball was in centre. I’m referring to open Beta 2.7.11.22211. Pedal action might still be off compared to the real thing but that is part of the flight model. Crabbing with the flight ball centered is not happening any more on my side. And I have to emphasize that I was not under the influence of alcohol when I made the quick test.
-
[REPORTED]elevators on tail boom not synchronised to cyclic pitch
Rifter replied to Rifter's topic in Bugs and Problems
Elevators are working again - nice! -
Seems to be fixed now - did some test flights and the flight ball behaviour was as expected.