Moonshine
-
Posts
611 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by Moonshine
-
 tested it, seems fine to me, see tracks attached. make sure you are not too low so the fins can actually open and slow the bomb down before it hits the ground and dont be too fast either otherwise the fins cant decelerate the bomb enough and surely dont be both Post-Designate-CCIP_MK82SE.trk Post-Designate-CCIP_MK82SE_3.trk Post-Designate-CCIP_MK82SE_2.trk
tested it, seems fine to me, see tracks attached. make sure you are not too low so the fins can actually open and slow the bomb down before it hits the ground and dont be too fast either otherwise the fins cant decelerate the bomb enough and surely dont be both Post-Designate-CCIP_MK82SE.trk Post-Designate-CCIP_MK82SE_3.trk Post-Designate-CCIP_MK82SE_2.trk -
reported earlier Al Dhafra air base ILS issues
Moonshine replied to breakneckPace's topic in Bugs and Problems
map problem, not aircraft; been reported for ages. makes some of the most interesting airfields on PG not very useable if ILS approaches are needed/wanted here some of the posts about it, there is many more in the PG bug report section -
that makes no sense, the rail itself doesnt move at all. you boresight the missile seeker. you only have to do it once per station as it will share the BSGT data to the other missiles on the same station
-
Pods are fixed at the cheek stations. The only thing that gets stowed are the lenses of the tgp when putting it to standby or power off. (Not sure if the 3D model shows it or not)
-
reported earlier Negative offset aim point
Moonshine replied to karpiyon's topic in Bugs and Problems
it was twice listed as "fixed" in the patchnotes but never really was -
There is a freeze option one could (and in this case should) use yes. No idea if the recentering of the crosshair is realistic on every sweep.
-
Yeah its funny, after the first fix you take, moving the tgp with the fix page open actally shows a decreasing offset the closer you get to your very initial steerpoint location. In my case it was the tower on the airfield. Deviation showed 0 the closer i got to that tower, even though the steerpoint diamond was at one end of the runway
-
taking a NAV-Fix with the TGP seems to not be putting the "updated" steerpoint location where i designated it using the same procedure as explained by wags here; <https://www.youtube.com/watch?v=RBHrEzLGSqw and here: https://forum.dcs.world/topic/209147-viper-mini-updates/?do=findComment&comment=4992813 OFLY works fine, HUD works fine and FCR works but is a pain as it constantly resets the crosshair during sweeps, having to start over Track attached, mission date 1980 to ensure GPS isnt available NAV-FIX_with_TGP_broken.trk

-
yeah they are still broken. been listed as fixed in two separate patches yet the issue remains. for both OAs, the symbology appears to be below ground. the higher you set the elevation data in the DED, the more "below ground" they appear. as if the values are in the negative. dont know why this thread has the "missing trackfile" tag still...
-
think these reports are related. JSOWs are pretty broken
-
Yeah same here. Very annoying.
-
investigating SA-8 no lock-on warning prior follow up shots
Moonshine replied to Moonshine's topic in General Bugs
that is true, and if its modelled in DCS as well then there is still something wrong with it as if it would use electro-optical tracker i should not get a launch warning either, similar to the HQ-7 and Rapier -
investigating SA-8 no lock-on warning prior follow up shots
Moonshine posted a topic in General Bugs
as the title says: fly towards SA-8 -> you get lock and launch warning. defend the first missiles (usually 2). turn back into the SA-8 -> you will get missile launch warning but no lock-on warning prior to that. out of the encyclopedia the SA-8 is semi-active radar homing. if i understand that correctly, that should always give lock before launch warnings on RWR track attached. RWR_no-follow-up-lock-warning.trk -
plane does roll right when a TGP is equipped as the TGP is on the right cheekstation. you can balance it out somewhat by also adding a HTS to the left cheekstation but its still not equal, so you will have to trim a little to the left. however it doesnt roll right when your jet has balanced loadouts (mostly when not having any pods at all) best way to try it out is a no wind mission (to avoid crosswind) and clean loadout. if the jet still rolls, then surely its not the planes fault
-
Furiz is right, i too moved from a vkb gunfighter mk3 (i have full linear axis settings, no deadzones whatsoever) to a realsimulator base and stick. I was by the impression that my vkb was very good yet as soon as i started using the RS setup i immediately noticed just how much better (less sluggish, no more delay caused by artificial deadzones) the force sensing stick is. now to not stray too far off of the topic here, i believe it does make a difference for aerial refuelling as due to the described „deadzone“ or „input delay“, you are always „chasing“ the proper position on the tanker and are always reactive instead of proactive, which might make the difference in staying connected or causing an unwanted disconnect due to overcorrection.
-
thats funny, i dont share this feeling about force sensing. moved from a VKB stick over to RS FSSB and the feeling of the jet was instantly better (more responsive, "snappier", instantaneous reaction to input...). tanking too felt a lot better as the jet reacted better to very small inputs and immediately stopped when no input is made. on the VKB i always felt my inputs are a little "delayed" compared to what they are with the current joystick. there does seem to be some "deadzone" for joysticks that are not force sensing. this can be an issue when refuelling hope ED can implement something down the line in the special options that would allow the player to choose the type of stick used.. this however might mean creating a second flight model in order to not worsen the situation for the people that do have force sensing sticks and thats a lot of work.
-
cannot repoduce and missing track file AGM-154A inaccuracy
Moonshine replied to jack333's topic in DCS: F-16C Viper
not sure if what you are reporting is related to this: if not, please attach a track replay -
reported Markpoint option "TGP" not showing up when cycling through
Moonshine replied to Moonshine's topic in Bugs and Problems
-
yes but that means it is also not detected by a C2 instance, hence no ROE has been decided yet. but what we are talking about is a contact, that on DL is shown as red (my jet does not yet see it yet, C2 however does and has marked it hostile). now that contact, as soon as my jet ALSO detects it, currently changes back to "unknown" at the very moment my radar paints it - even though C2 still sees it - which means i can not be the only one painting that contact... the current implementation logic is wrong and needs to be fixed. in addition to that C2 has marked it as hostile already, there is no need to also have to correlate that track with my radar/NCTR to maintain the hostile classification.
-
Exactly my point. The inability to set burst altitude at all for normal parameter drops is a different bug
-
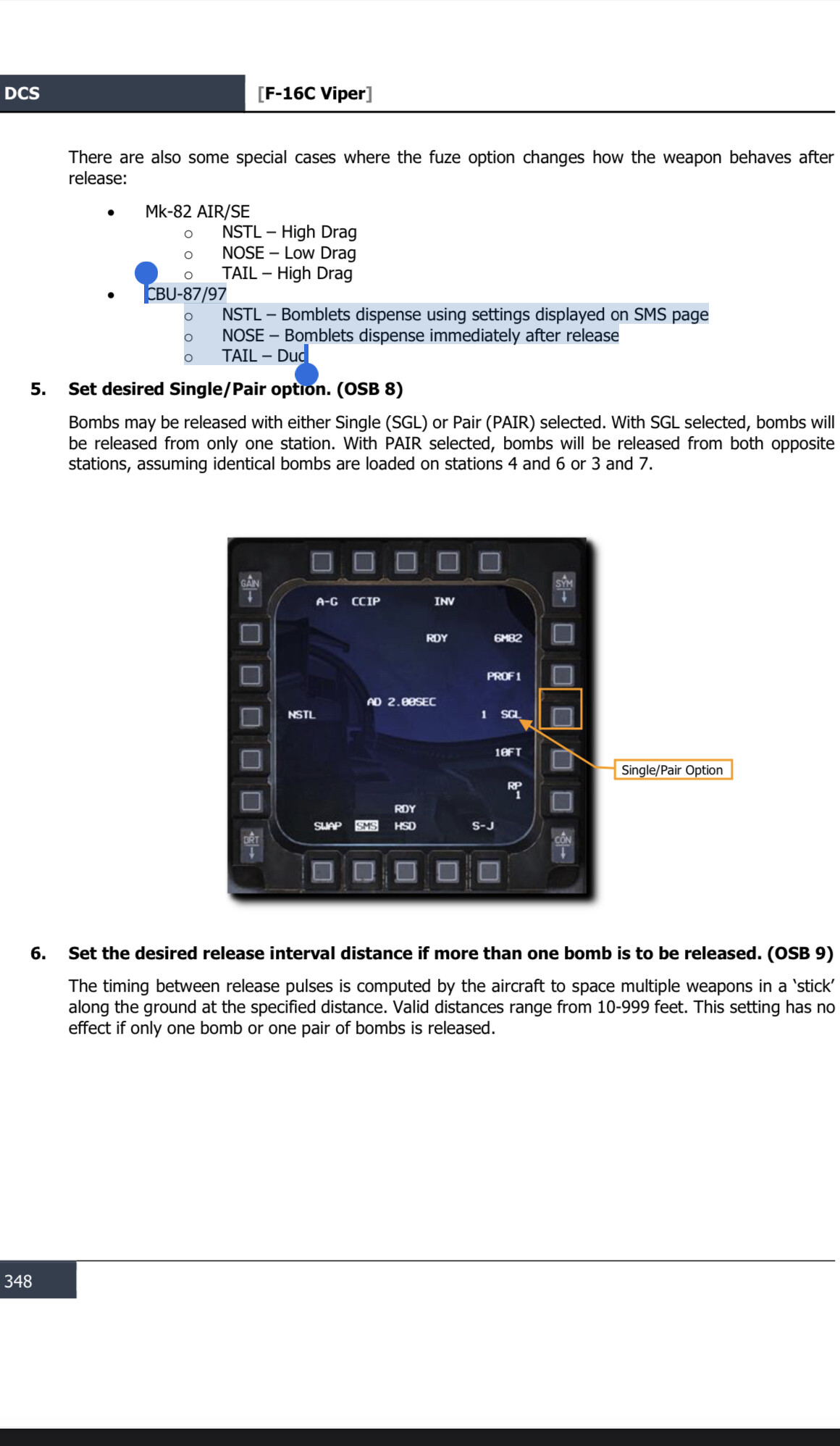
im looking forward to see the implementation down the road. of course i am dropping "outside of parameters" for a normal CCIP release but that is clearly not what i am trying to do. while yes the bombs missing is correct if the intention and bomb settings were used as you would for a normal CCIP release, it is not correct for what i tried to do and what i am reporting. but its splitting hairs at this point. fact is currently using Nose fuze for CBU-87 during a low level drop will result in a miss due to missing implementation of fuzing options. the reason i reported a bug is because it did work in the past and now suddenly it doesnt anymore.
-
Then i don’t understand why its „correct as is“ since clearly it isnt. the thing i am reporting is the fact that the bomblets impact long of the CCIP pipper, which in the past wasnt happening and the bomb was on target even when using Nose fuze only for a low level release so the canister instantly opens after clearing the jet
-
im not sure if i understand this correctly, are you changing the manual so it reflects the ingame state or are you changing the ingame state to reflect what is correctly stated in the manual?
-
Exactly. Hence the title is specifically chosen that way… just „fly higher than 1500ft“ will surely solve the problem, however Nose fuze option was made for exactly when the situation requires lower ingress altitudes than the preset burst altitude… oh well… from the manual, page 348;