RealDCSpilot
-
Posts
1373 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by RealDCSpilot
-
It's more realistic than you think. DCS as a sim does the right thing, if someone tunes to much wind in there. The basic principles of uplift:
-
@Ramsay Oh you are mixing up a lot here. Yes, the discord screenshot was taken one day after the 26th of january this year, but no video was involved. In a FM discussion on RAZBAM's discord, it was brought up that the possibility of turning the Gazelle upside-down and hold it there in DCS, comes from the wrong feature of turn-rate with cyclic input. At full deflection the turn rate multiplies the rotating force on the game object (the 3d model which looks like a Gazelle helicopter) so strong that it simply enables you to hold it upside down and keep it floating in air, with collective full down to the floor. At the same time the main rotor shouldn't be able to produce any uplift in the wrong direction because there is no pitch angle for negative thrust direction. But magically it does in DCS, with a simple good FM it should simply fall straight out of the sky, because auto rotation doesn't work upside down nor are any mechanical parts able to withstand the forces in such an attitude. What's more concerning is that they use discord to tell people that a 5 year old problem is just a "myth".
-
Hmm, i expect honesty from a developer posting here, to us and himself. If they don't bother...? Well...
-

[Request] Autopilot cheat for SA-342 and OH-58D
RealDCSpilot replied to Volator's topic in Polychop-Simulations
I'm waiting for proper FFB support since release of the module. -
Discord makes posting stuff like this easy for them: They use it to create their own reality.

-
Well for me the problem is kinda solved. Was lucky to get my 3090 for a normal price.
-
I have to ask this, did you place the speakers correctly in front of each ear? If you still have audio quality issues, then something must be wrong with your HMD since you got one of the best audio solutions for VR HMDs.
-
Yes, but it explains your own findings.
-
Nvidia starts to support DLSS in VR
RealDCSpilot replied to speed-of-heat's topic in Virtual Reality
While we discuss, some other developers just did this: -
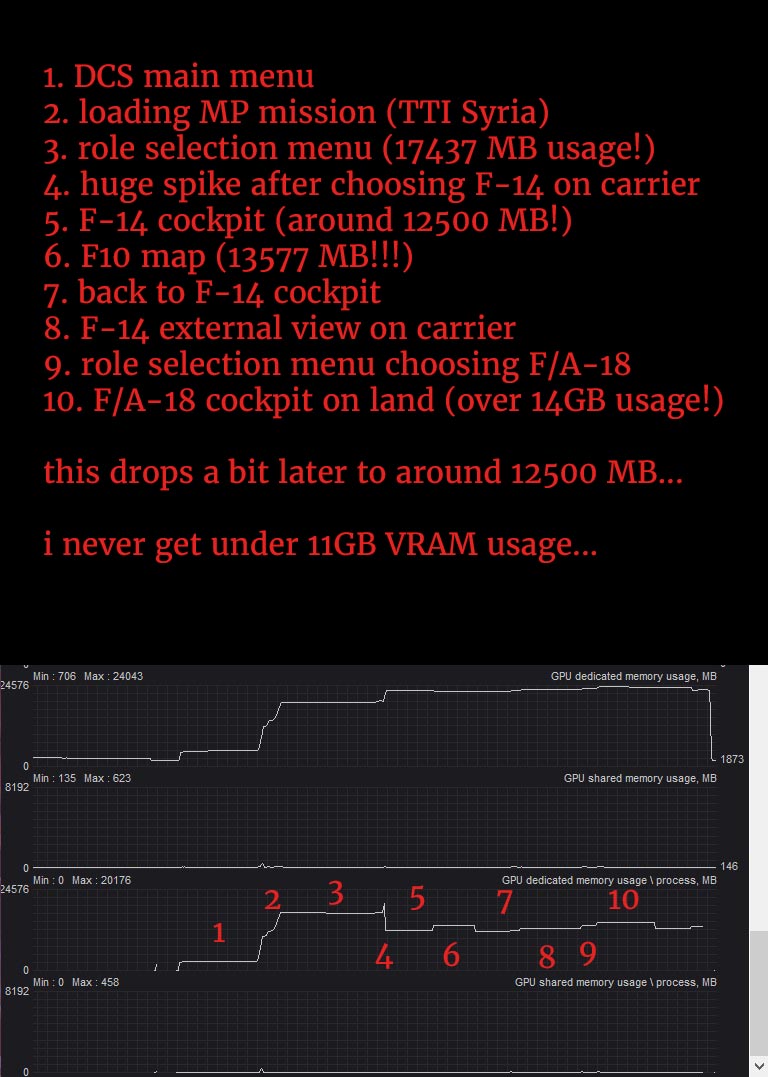
Yes, it maybe possible for a while, if you only use one module for the whole time. But my playstyle is different, those missions offer a wide variety of targets and objectives, so i switch modules often for the best aircraft for the particular job. Raiding airfields with a Ka-50 or Harrier behind enemy lines, sink ships with a F-18 or Viggen, attacking a vehicle convoy with a A-10C or going air to air with an F-14... This is how VRAM usage looks then: https://forums.eagle.ru/uploads/monthly_2020_10/VRAM_usage_Syria.jpg.0c970d322e0f7232b2fc7c0f2f5ff0ba.jpg But keep in mind, everything with maxed out graphics quality settings...
-
@FoxTwo Yeah, those settings may be fine for a while. But sooner or later in a massive MP mission a 3080 will fall short because average VRAM usage will become >11GB over time. Turning down as much as possible is the only option. A 3080 might be enough for VR and a G2 running at full resolution for "normal" VR games, but both of our most modern flightsims aren't normal in any aspect. Just for comparison: these are my 2.7 settings in the options.lua, besides a lot of system wide optimizations. Smooth 40 fps locked in 80 Hz mode (frametime varies from 16ms to 24ms) in 40 player scenarios on Syria map. 2648x2740 per eye and Reshade sharpening for VR enabled (before ReShade for VR was released, i was running 2880x3200 per eye). I can play these missions for hours, switch to all available modules without any issue. ["VR"] = { ["bloom"] = true, ["box_mouse_cursor"] = true, ["custom_IPD"] = "62", ["custom_IPD_enable"] = true, ["enable"] = true, ["hand_controllers"] = false, ["interaction_with_grip_only"] = false, ["mirror_crop"] = false, ["mirror_source"] = 0, ["mirror_use_DCS_resolution"] = true, ["msaaMaskSize"] = 0.69, ["pixel_density"] = 1, ["prefer_built_in_audio"] = true, ["use_mouse"] = false, ["format"] = 1, ["graphics"] = { ["DOF"] = 0, ["LensEffects"] = 2, ["MSAA"] = 2, ["SSAA"] = 0, ["SSAO"] = 1, ["SSLR"] = 1, ["anisotropy"] = 4, ["aspect"] = 1, ["box_mouse_cursor"] = true, ["chimneySmokeDensity"] = 10, ["civTraffic"] = "", ["clouds"] = 0, ["clutterMaxDistance"] = 800, ["cockpitGI"] = 1, ["effects"] = 3, ["flatTerrainShadows"] = 1, ["forestDetailsFactor"] = 1, ["forestDistanceFactor"] = 1, ["fullScreen"] = false, ["heatBlr"] = 1, ["height"] = 1024, ["lights"] = 2, ["messagesFontScale"] = 1, ["motionBlur"] = 0, ["multiMonitorSetup"] = "1camera", ["outputGamma"] = 2.2, ["preloadRadius"] = 150000, ["rainDroplets"] = true, ["scaleGui"] = 1, ["sceneryDetailsFactor"] = 1, ["shadowTree"] = false, ["shadows"] = 4, ["sync"] = false, ["terrainTextures"] = "max", ["textures"] = 2, ["useDeferredShading"] = 1, ["visibRange"] = "Extreme", ["water"] = 2, ["width"] = 1024, },
-
In the end it depends on the missions you play, a small singleplayer mission will show much lesser VRAM usage than a full blown module soup on MP in Syria.
-
Your only chance is to lower SS settings and anything else that will cost VRAM usage (textures, any additional monitor etc.). For a high resolution HMD like the G2 and DCS, VRAM is a bottleneck. https://forums.eagle.ru/topic/246767-more-vram-helps-a-lot-with-dcs-vr-performance/
-
Simshaker not working after windows update!
RealDCSpilot replied to drack's topic in PC Hardware and Related Software
Sorry, the only thing i can tell you is that simshaker for aviators is working fine after upgrading Win10 to 21H1 on my end. -
Well, i chose the most lazy path. This way i also have a backup stick base. I'm sure you can get a much cheaper controller (Arduino/Leo Bodnar) to get any grip running.
-
The easiest approach would be designing and 3D-printing an adapter for the Virpil grip. Like what did for the G940 a couple of years ago: https://www.thingiverse.com/thing:3849592 You would need to buy a Virpil grip and a WarBRD base (to get the controller PCB). From there you will have a 2-in-1 device.
-
IRL NVGs are focused on everything outside the cockpit.
-
Force Feedback Joystick Coming soon
RealDCSpilot replied to FoxHoundcn's topic in PC Hardware and Related Software
I think the Gauss FFB base will never be available outside of China... -
My experience with force feedback in DCS
RealDCSpilot replied to Braeden108's topic in PC Hardware and Related Software
Old trick: block that deadman sensor on the grip with a tape, this way you can let the stick hold the trim setting while letting the aircraft fly with hands off. -
Basically every module supports FFB (except the horrible Gazelle module). In WW2 planes the stick reacts to forces on control surfaces, on ground it's loose - the faster you go the more force is directionally applied to the stick. In A-10C's, F-14B and F-5 it uses the realistic offset center trim. In the Mig-21 you get the SAU functionality where the autopilot controls the stick. In ED helicopters it's simply the best way to get as close to real helicopter controls as possible. The rest of the planes supports the trim functionality pretty well, how much, depends on the module and it's FCS capabilities. Pro tip: block the deadman sensor on the grip with a tape, to prevent shutdown of the motors if you let the stick go.
-
3080ti vs 6900XT , any guesses which one will be better?
RealDCSpilot replied to Bog9y's topic in Virtual Reality
If you only want to play DCS the rasterizer only GPU might fit a bit better. If you want to play other games as well, raytracing and DLSS on dedicated cores aren't features to ignore. -
Nvidia starts to support DLSS in VR
RealDCSpilot replied to speed-of-heat's topic in Virtual Reality
AI driven image enhancement with raytracing on top is definitely the next gen step like pixel shaders was over a decade ago: -
Nvidia starts to support DLSS in VR
RealDCSpilot replied to speed-of-heat's topic in Virtual Reality
@5ephir0th My post was about that DLSS is not using RT cores, they are purely for raytracing tasks. It uses tensor cores, which also work with WinML and DirectML by the way... So Nvidia and AMD could surely benefit from FSR, but Nvidia will get the boost on top while AMD has to sacrifice some rasterizer performance. -
Nvidia starts to support DLSS in VR
RealDCSpilot replied to speed-of-heat's topic in Virtual Reality
As far as i remember, this was the case when DLSS 1.0 was introduced with 20XX cards. DLSS 2.1 doesn't need that anymore, developers can do it on their own. RTX cards have 3 different core types on the chip, rasterizer (for regular 3D rendering), raytracing and tensor cores (for AI operations). DLSS will make use of the tensor cores only, the combination of rasterizer and tensor cores will bring the performance boost. AMD's FidelityFX won't be that efficient, AMD cards have no special separate cores and their super sampling tech will take ressources from rasterizer performance. -
Some CPU BIOS settings are pretty bad for DCS VR...
RealDCSpilot replied to RealDCSpilot's topic in Virtual Reality
I think it affects all processors in some way, it depends on what auto/standard settings mainboard manufacturers provide in their BIOS. In my testing sessions i found that these options worked against DCS's VR performance (high end system on extreme image quality settings). My recommendations besides classic OC: - Intel Turbo Boost Max Technology (i set it to Legacy) - Hyper Threading Technology (disabled) - Intel Speed Shift Technology (disabled) - CPU EIST function (disabled) - Enhanced Multicore Performance (disabled) - Intel Turbo Boost Technology (disabled)