jubuttib
-
Posts
457 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by jubuttib
-
Marking razo+r's post as solution, since it was a full or partial one to a few issues. You are of course entirely correct, thinking back I must have been making my startup list as a combination of your guide and Wag's old old video, or something like that, and whiffed on the HMCS. Figured out what was going wrong, and it was pure mea culpa: 1. This was sorted out by HMCS alignment. 2. This too. 3. This took a few more tries, but I finally figured out that I was being an idiot, and didn't take "either enter or confirm" to mean I literally had to go through the lat, long and alt, and hit ENTER on them to confirm, I just checked that the numbers were correct, and if they were I didn't do anything else. So I was getting degraded alignment, ugh. Actually confirming them with ENTER solved this. 4. Same solution for this, the CCRP guidance is given by the plane, not the TGP, so degraded guidance was causing this to be off. If I manually put the box on the HUD to where I wanted to hit, it compensated for the issue. 5. This was a combination of the solution to 3. and also the Cursor Zero function. Many lessons learned, thanks for the help!
-
Heya, thought I'd post this to ask before I start submitting bugs: I've probably missed some update note that explains what changed and how, but I'm currently struggling with massive differences in where things are, where my sensors point towards, and where the boxes show up on in my HUD and especially HMCS. The main problems so far: 1. Steerpoints set in ME are pretty much where they should on the HUD, but they're usually nowhere near the same place on HMCS 2. HMCS overall seems to disagree with HUD on where things are, and HMCS shows for example the octagon box around a datalink marked friendly plane (usually) way above where the actual plane is, and when trying to aim AIM-9Xs with my head, I usually need to put the diamond indicating where the missile seeker is looking below the target to actually get tone. 3. TGP looks at the correct spot when slaved to the steerpoint, but the HUD shows it being wildly off target, and HMCS disagrees with HUD 4. If I lock a target with the TGP and use smart munitions (JSOW, JDAM, WCMD...), they hit where they should. If I lock a target with the TGP and use dumb munitions with CCRP, they hit where the HUD shows the TGP to be looking, not where it's actually looking. If I slew the targeting box on the HUD to where the target is, my bombs hit roughly there, but the TGP view shows it's not looking anywhere near there. 5. If I lock up a target with the TGP, then make that into a markpoint, there's pretty much always a significant, but not massive difference between where the TGP was looking, and where it looks when you slave it to the markpoint. I've been using the startup method outlined in Chuck's guide for a good while now, and it's probably badly out of date. For aligning the INS I just flip up to Align - NORM, double check the co-ordinates vs. F10 map (with the correct decimal format) and let it align until I get 10 and the RDY is flashing, then I go to NAV. No HMCS or TGP alignment is involved in the process, are these necessary? I do know about the Maverick and TGP boresighting, and that I can do OK, and get OK results.
-
There are small USB "GPUs" (people often call them adapters, but really they're small GPUs) that you can get, which is what I did. I managed to snag 2x J5 Create JUA330s for the price of one, then two DVI -> HDMI cables and some USB to barrel plug adapters to power the cheap LCD modules I got from AliExpress. Works a treat. Be careful though, trying to google for those you'll run into many "USB -> HDMI adapters" that are using the "DisplayPort over USB" method/standard, and these (afaik) only work when used with a suitable Type-C port, you can't plug them into any old USB-A port with an adapter. I'm not even sure how many desktop motherboards support this feature over their USB Type-C ports, or if it's mostly a laptop thing...
-
Wait what? The Ka-50 in my experience really wants you to hold rather than tap (at least outside of Flight Director mode), so that the position of your cyclic isn't affected by the AP channel inputs. If you don't hold it, your cyclic might be ~20% away from what the combined output of the cyclic and autopilot was. Same for the Hind (and to an extent the Apache), where the AP channels get reset when you hold the trim. =/ With the Huey and Mi-8 it doesn't matter, because the Huey doesn't have any autopilot/stability augmentation, and the Mi-8 doesn't disable the autopilot/stability augmentation channels when you press the trim button (if you want to recenter the channels you either turn the AP channels off and back on again, or use the dials to tune them out). With those two the only reason to hold the trim button would be if you had an FFB stick and wanted to get rid of the FFB resistance during trimming.
-
The collective SAS is indeed binging at me constantly, seemingly with any slight change in altitude or ascent/descent rate. It's gotten to the point that I turn off the collective channel of the SAS altogether.
-
It would be cool if the maker of the A-29 Super Tucano mod would share their tech for the FLIR implementation they did. It's the first time I've seen a mod have a proper 360 degree, multilevel + smooth zoom, tracking and lasing capability custom targeting system like that on an onboard MFD as well, instead of the common "let's use the Su-25T as a base and just put a Shkval in it". A limited implementation of that could work great for what you're talking about.
-
Thanks for those bits. Any idea about the smooth zoom? Maybe a HOTAS command?
-
Related to this, anyone able to explain what all the bindings do? Some of them are fairly obvious, while others are decidedly less so. The ones I think I understand: Auto Gain, turns on auto gain Cage, cages the seeker, I guess? I assume this doesn't work as a cage/uncage? Focus In/Out, focuses the camera Freeze, freezes the image Gain Down/Up, manual adjustment of gain, vs Auto Gain Level Down/Up, manual adjustment of level, vs Auto Gain again I think Menu, brings up the menu I suppose? NFOV, narrow field of view, zooms in Polarity, swaps between BHOT and WHOT Power, turns power on Slew, slews the FLIR around (very slowly?) WFOV, wide field of view, zooms out The ones I'm not at all sure about: Hook IPHH Lock Track/Break I'm not at all sure I get what the difference between hook, lock and track/break is, what do they do? And IPHH is completely unknown to me. Also based on one of the videos, it seemed like there was more than two zoom levels? Even when I hit NFOV it feels like it's not actually that zoomed in, is there something I'm missing? EDIT: At 1:53 in this video there's a smooth zoom, so I'm clearly missing something...
-
Are you starting hot or cold? One thing someone in YT comments told me was that to get the FLIR to work you have to start cold, it won't work if you start with a hot plane. Worth a try?
-
I get Huey and Hind, but the Mi-8 crew don't do anything that'd be worth saying, do they? Aren't they just cockpit ornaments?
-
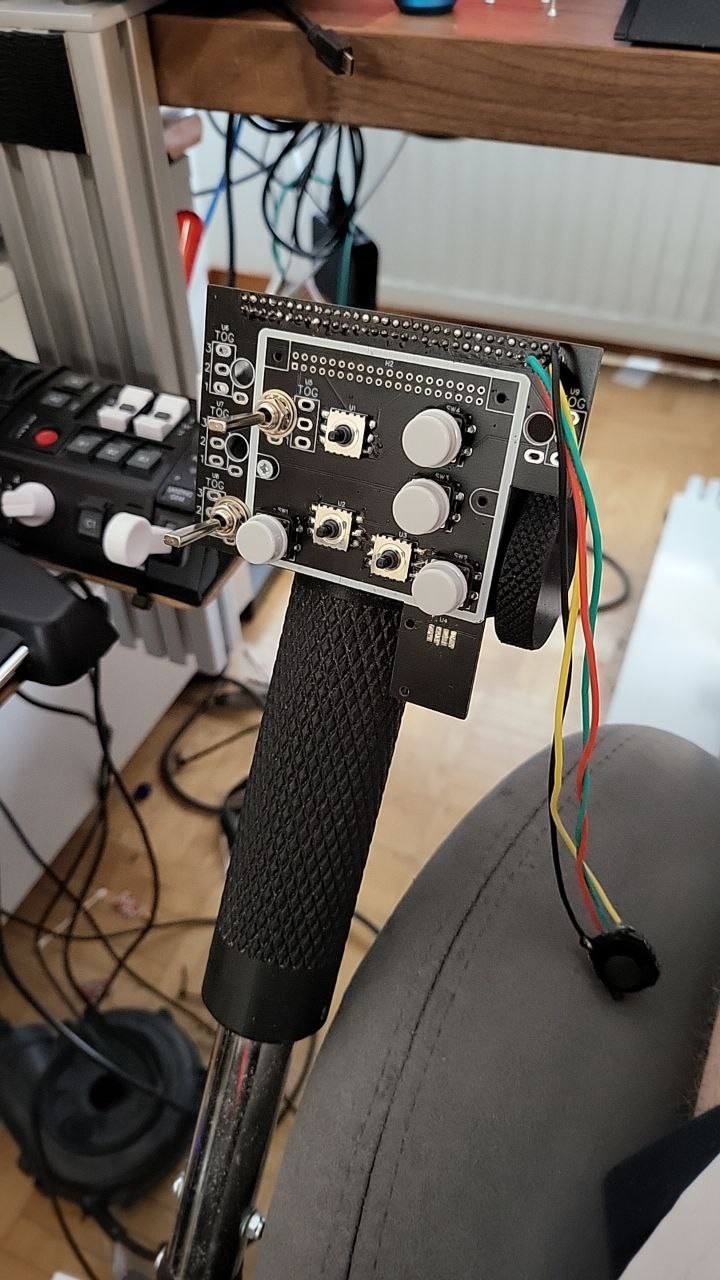
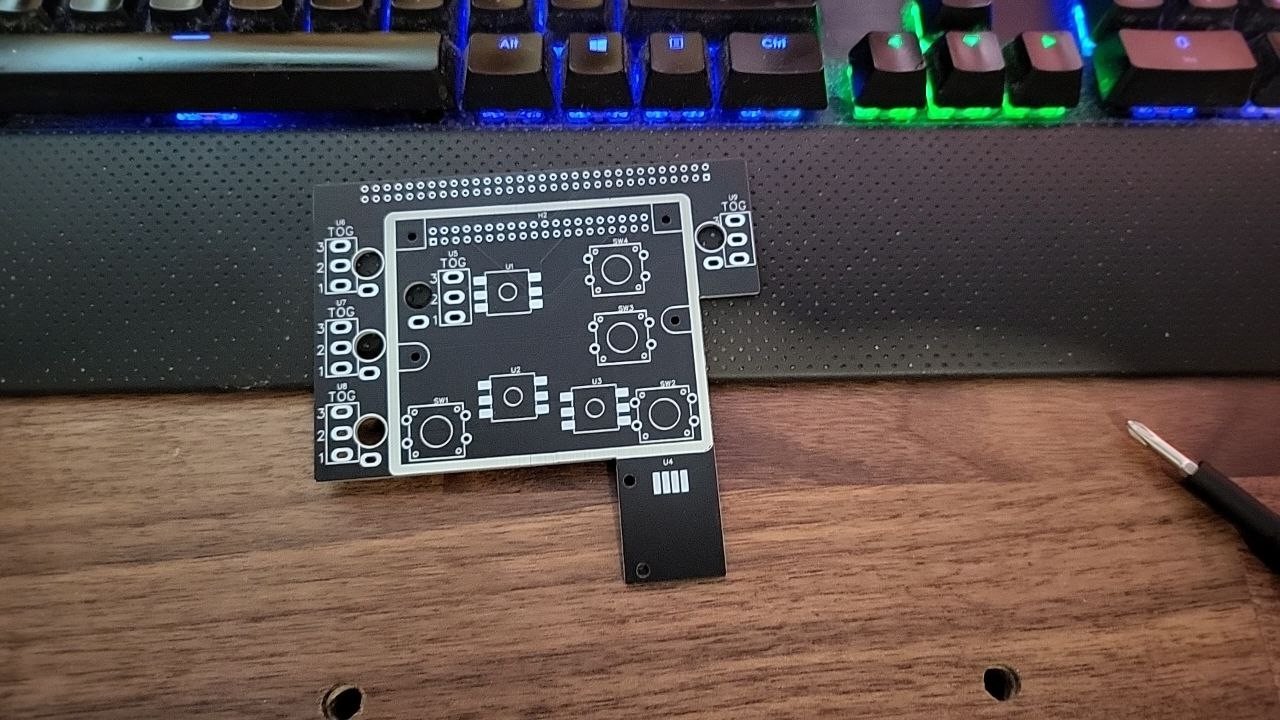
First of all I want to thank K-51/Mikhail for making such a damn good collective, and being so helpful with the information I needed to get this mod going. I really love the device, just wanted to try different things, and maybe something that suits the Apache specifically a bit better. Made a post on r/HotasDIY earlier, and some people were asking for a kit for the modification, which I unfortunately can't provide due to lack of available components and time to dedicate to something like this. So I decided to smooth some corners, and posted a new thread, which includes my project files, Gerber files for the updated design (which fixes the analog stick wiring issue, among other small tweaks) and a full parts list and some wiring guidance. Getting the PCB from somewhere like JLCPCB costs like 7-8€ + shipping (which ranges from like 5-8€ for the cheap options, or if you want it NOW you can pay 50+€) and you get 5 of them, so you have spares. The project file also has some of the relevant dimensions and marks where the internal supports (screw placements) are, so you can use it as a basis to design your own replacement top should you want. The thing looks ROUGH, because I just wanted to get it to a working state, rather than prettying it up. And because it's still the old PCB that has the wrong wiring for the analog stick... But it's been a real fun project, and I really like the functionality of the end result.
-
Deviousness deviates... (The PCB has a design flaw caused by a wrong defined component in the PCB design program's user submitted files, basically the thumbstick's pads have VCC and GND reversed, gonna have to wire the analog stick externally for this)

-
My devious plans are starting to come together, muahaahahahahaha! Hopefully Mikhail won't mind me posting this here. So, first version of the custom PCB replacement top for the collective came in (as in this replaces the whole top of the "button box", using the same mounting points). The area outlined in white is the current top panel area, I will have a few things hanging off of the sides, as you can see. Will be interesting to see how this works out (still waiting on cables).
-
100% this, though getting the even more direct equivalent, Mi-28, someday would be great. Not holding my breath. The Mi-24P is indeed limited in modern theatres, because it's not a modern helicopter. Getting a more modern variant/upgrade package would be cool (I'd really love a Superhind Mk. IV or V, so ugly and cool), but it's also kind of like asking for the Romanian MiG-21 upgrade package (glass cockpit etc. by Elbit), because the normal Fishbed isn't viable in a modern theatre.
-
Was probably a bit unclear, my issues with the yaw channel started with the update before Wednesday, when the hover hold and attitude hold modes were introduced. You can still fly it well definitely, but I noticed multiple times when in hover/near hover that adding a bit of pedal caused the yaw channel to wobble side to side. If it was just the helicopter wobbling that'd be one thing, but the autopilot yaw channel readouts themselves were being really aggressive.
-
The missile is old, but as far as I understand it was implemented in the Hind sometime during the 80s, and they could have done things somewhat differently back then.
-
Looking forward to getting the behavior a bit closer to what Raptor9 describes. It's not terribly bad for me right now, the main thing getting in my way is how doing even small adjustments to my anti-torque pedals in a hover currently leads to the yaw channel of the SCAS bouncing left and right, making the whole heli wobble. Didn't use to do that before the updates, or at least was much less of an issue.
-
Man, that looks sick! Am I guessing right that there are a total of 6 axis in the lever area (two wheels on the bottom and 4 levers), swappable handles on the levers, with ability to put buttons on the right side levers? Are those two rotary things on the button box area pots or encoders? Looks really cool either way.
-
Seems highly unlikely. 4 sides of the "box" at the end (bottom, left, right and the part attaching to the handle) are all effectively one piece, and the throttle twist mechanism is also part of that assembly. Any sort of adapter would A) make the whole thing super duper long, with the added length of the collective handles, and B) attach into a 3D printed box structure that was never designed to act as anything other than a place for buttons and some wiring, not a structural part.
-
Aaaah right. Yeah I've taken it apart a couple of times. My intention is to reallocate some of the space (like replacing your two hat switches with 5-ways, and adding another 5-way where the 3-position switch and red button are), and also extend the button layout beyond the "box". So I'm intending to add a mini-thumbstick "below" where the red button is, so it'll overhang the box somewhat, and add more stuff to the left and right sides of the box. If you can send me the screw spacings and the dimensions of the top, I can start working on the sketches and layout, and send you pics of what I'm thinking of. EDIT: And all the extra buttons will use their own wiring into a separate Bodnar USB device, which I'll put "somewhere". So there will be a wire running from the head down to the base externally. Not going to be pretty, but hey ho.
-
Not entirely sure what you mean by this? Do you want to see the innards of the collective head to deduce the specific version or something?
-
Hello K-51! I'm still massively enjoying my collective, one of the best purchases I've ever done, and also a completely different user experience from what me and my friends (some of whom have also bought your collective) have had with small boutique made gear. By which I mean: This thing has worked perfectly reliably, hehe. But as is normal, "appetite increases as you eat" (a saying in my country, not sure how common it is elsewhere), and I find myself wanting to add functionality to the unit. For ease of working I've settled upon making all new controls via a second USB device, so as to leave your electronics untouched, and replacing rather than modifying your panels. This brings me to a request: Would it be possible for you to share the correct dimensions for the screw spacings etc., so that making replacement panels would be a bit easier?
-
0.3.0? Is that the latest dev build or something? The latest public one was 0.2.0b if I recall.
-
Many thanks! Will get to practicing.
-
Just to add: My pilot or co-pilot has not been hit once that I can tell, it's always been the heli that breaks (either rotor or engine(s)).