XPACT
-
Posts
285 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by XPACT
-

reported Hind black low level of detail pixel at distance
XPACT replied to Fusion1944's topic in Bugs and Problems
Yes, Hind is currently represented as a big black square at relatively close distance, very unpleasing to the eye. Honestly seems like last LOD level is missing -
There is one problem however that will hopefully get fixed at some point and that is: aiming reticle is rendered outside of reflector glass to the left when sight is folded, currently it seems that it is setup correctly only when the sight is in the non folded position that we can't use.
-
need track replay Engine Temp and Oil Pressure in engine idle
XPACT replied to Rabies's topic in Bugs and Problems
More or less bottom yellow line on the rotor RPM gauge (left one). The thing is, especially when heavy, if you are for example dropping in altitude and suddenly raise collective (usually people tend to max it out) because of that blade pitch angle change you suddenly have engines that need to work much harder to keep rotor RPM in ideal range and sometimes they can't. Basically you as a pilot need to keep your rotor RPM in check especially when doing maneuvers, if it starts dropping lower the collective and pitch nose down if you are in near hover, if you have some forward speed that is outside VRS range then simply lower collective a bit and you will instantly see rotor RPMs go up. Also if your throttle wasn't all the way up and you feel that heli is underpowered raise it or even max it out. -
It's a bit late for me to go in depth but I thought you would find this video interesting I will spoil it a bit, yes stick will stay in the newly trimmed position and will always return there until it is either retrimmed to new a position (and then it will always want to return there) or untrimmed completely.
-
As per title when you enter into hot started Mi-24P voice warning system RI-65 will "work" but produce no sound, after power cycle you can suddenly hear it working properly. Can't guarantee but I am pretty sure that first time I spotted the bug it was in multiplayer session when joining already started Mi-24P as pilot operator. I have a list of other bugs that I will report one by one in the days to come just need to get tracks sorted out so it's easier for you to see what's going on. But to go back on topic, here is the small track showcasing RI-65 bug. RI-65_power_cycle.trk
-
Can you post a track file when that happens? That would be very useful in determining what it is.
-
Well it's not as simple as that. Retreating blade stall happens on that kind of coaxial design also but there will be no banking to left or right that will be canceled out but nose should still pitch up at one point. Thing is coaxial rotors make a lot of stuff much different to model and warp your head around it. It was a bad example by me considering blade collision because only reason that happens is as you mentioned high blade pitch that will cause a lot of flapping on the bottom rotor. With no collective input you can get away with some high speeds but nose will try to go up even in DCS (just tested it to see if my brain still works at 5AM).
-
need track replay Engine Temp and Oil Pressure in engine idle
XPACT replied to Rabies's topic in Bugs and Problems
Your rotor RPM drops below threshold for AC generators shortly after you throttle down to idle and they go out so some gauges stop working. If you want to throttle down to idle I would flip PO-750A inverter to ON that will use battery power for those gauges and some systems when AC generators go out. Keep in mind that even with PO-750A in ON position you will lose gyros and autopilot channels. -
reported A mistake in the engine temperature gauge
XPACT replied to zerO_crash's topic in Bugs and Problems
I know. I was pointing out that "real life evidence needed" tag was placed by someone moderating these bug forums, basically trying to suggest that it's like that, misprinted, in the real aircraft which I highly doubt! -
reported A mistake in the engine temperature gauge
XPACT replied to zerO_crash's topic in Bugs and Problems
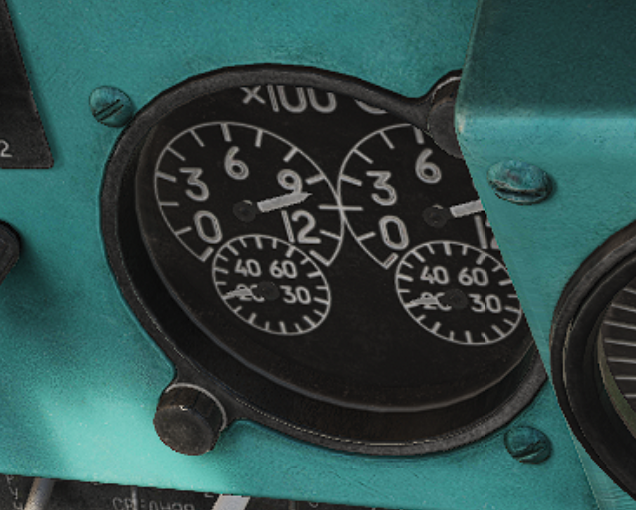
Real life evidence needed -.- well only if Mil misprinted them on every Mi-24P yeah, sure. It's the exact same EGT gauge as in Ka-50. Temperature scale obviously goes up, 20 -> 40 -> 60 -> 80 Big needles show hundreds small ones tenths I will try to find real life evidence tho... -
I tried everything to set it on fire, but my EGT never goes over 990-995°C on the gauge
-
reported A mistake in the engine temperature gauge
XPACT replied to zerO_crash's topic in Bugs and Problems
Evidence for such thing? That definitely reads 30 instead of 80
-
I tried to replicate it both slow and at 300km/h, collective fully down and nose up, I over revved rotor at 300km/h one but there was still no sudden pitch up. Post a short track file and I will gladly take a look at it.
-
Also known as retreating blade stall. That can and will happen with every helicopter at fast forward flight, while you are over 270km/h IAS you need to be gentle with your inputs but even that won't save you from massive over speed. Since Hind has clockwise rotating blades when you induce retreating blade stall it will pitch up and to the right (counter clockwise rotating blades would pitch up and to the left). For example on Ka-50 that doesn't happen because before your nose goes up your coaxial rotor blades already chopped themselves to pieces.
-
On the sight itself (left side) you have two switches set upper one to Sync and bottom one to Auto Now you should see where operator is pointing his targeting/observation sight
-
I think it's just calculation error, it's using only radar altimeter height and aircraft pitch angle to compute solution of course with gyro to account for aircraft movement but any weapon that has slower velocity will have worse predicted impact point because in that case elevation difference error gets bigger automatically (if target is at different elevation compared to what is below your aircraft then results will be way off) With gun since rounds are pretty fast and usually used at shorter distance it's almost always pretty much in the center of sight anyway without any other movement from aircraft (if there is movement weapons control system will compute solution for that with help of gyro no problem also)
-
Not really it's likely just throttle position desync, operator client then sees low engine and rotor RPM and since rotor RPM needs to be above some threshold for AC generators to work you get no power in the operator seat. I found that if pilot fiddles with the throttle a bit everything will go back to normal and you will sync with him again.
-
Click on Profile -> Edit/Delete there you will have Steam account tab and "Get licenses" button after it finds Hind you will have to press "Transfer licenses"
-
Loss of left engine power lead to loss of right engine
XPACT replied to Rongor's topic in DCS: Ka-50 Black Shark
Well Ka-50 has 2x2400shp so now you have almost 2400shp less, after losing one engine you did the correct thing and placed throttle lever into emergency this grants you a bit more power but helicopter is still extremely under powered, next thing to do would be to jettison missile pods/fuel tanks and probably even fire all Vikhr with that red emergency ATGM jettison switch (un/fused- switch that controls this is next to ATGM jettison) into safe direction or enemy territory while doing these things never let the helicopter get slower than 80km/h, you can't hover with one engine. Rolling landing is preferred, "hover" landing can be done but it will more resemble autorotation landing. By flying with forward speed of >80km/h you will see that you can hold speed/altitude and even climb you can also look at your EPR gauge and you will see that working engine is really pushing it so RTB should be done ASAP. One more thing, raising the collective should be done with caution when you lose one engine, because at higher collective position one engine will be unable to keep rotor RPM in the allowed range causing even more trouble VRS and also AC generator will stop functioning which will in turn shut down some of the systems and others will be powered via inverter until rotor RPM is restored. So constantly keep rotor RPM in check. -
Some observations regarding 2.7.x crashes/ctds & overclocking
XPACT replied to The LT's topic in Game Crash
DCS isn't really CPU demanding, single core usage somewhat but overall CPU utilization will be low. My bet is that you use adaptive voltage in your OC meaning you have all power savings active which is very hard to get right and "stable". I saw numerous PCs get through rigorous testing with linpack and prime95 just to crash on the desktop while moving mouse due to voltage dips/transients caused by power saving features. -
In that case FC planes need at least a keybind to turn radio receive completely off or radio volume control whatever is easier to implement from those, because as I said earlier it interferes with missions where you have constant or multiple transmissions. Only way to workaround it currently is reducing helmet volume in sound options but that is such a bad workaround that I wouldn't even call it one.
-
Flickering and glitches happening under certain conditions.
XPACT replied to Rainbowgeorge's topic in 2D Video Bugs
Both of those issues happen to me as well and I am also using AMD Vega 64. Other threads do seem connected to this one and it mostly impacts AMD cards but few Nvidia owners had similar (possibly the same) graphical glitches too -
@Flappie Is there any info regarding this issue? Not only this but they also receive ARK-UD frequencies for example 114.166MHz which those radios in FC3 aircraft couldn't even tune into so only work around now is to lower/disable helmet volume but you will lose voice warnings and awacs callouts It's hard to make a search and rescue mission with FC3 aircrafts around without pilots in them losing their mind or disabling helmet volume which is not a fix but a very bad workaround.
-
You mean this video? https://www.youtube.com/watch?v=dIpQ0nOsT6o Well I must inform you that it was a direct hit, F-15 was damaged but landed, if I remember correctly rear horizontal stabilizer was hit... but missile obviously didn't detonate either because of malfunction or it was damaged during modification for ground launch. If that missile detonated those engines would be no more. Edit: Forgot to add in original post, Iran ≠ Yemen
-
Are you mostly talking about navigation systems? Flight model wise I don't expect much to change (maybe even more damper improvements) and sensor behavior wise only RWR is expected to be made from the ground up, everything else in my opinion will be much better and even simpler to use with FF than it is now. Not to mention all the fun stuff that FF brings like emergency procedures, people will start to appreciate how redundant MiG-29 really is, except radar of course that thing was quite unreliable in first versions. Sensors are as said by @Harlikwin very simplified on every aircraft and I don't expect much change in radar behavior. Even SPO-15 which IRL is a hit or miss depending on revision will probably be simulated how it's supposed to work, like it's done on every aircraft so far (basically all RWRs are too good in the sim currently) and with complete revamp and added features of real SPO-15 it will be much more powerful in terms of situational awareness. But I agree that FF MiG-29A will be an eye opening but in a good way, people that liked it as FC3 are about to like it even more