edmuss
-
Posts
1740 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by edmuss
-
Does this apply to the IT23 in BS3? As soon as I turn it on I lose 2ms on 1024 resolution, A10C I lose almost nothing from turning the TGP on. I do use your A10C reduced bit depth bump maps but I don't think that modifies the MFD display does it? Making the IT23 as performant as the A10C TGP would be awesome. Would it be possible for you to put together a quick and dirty guide on how people can modify the textures themselves? I'm not too bothered about IC currently but if it can be shown to improve performance significantly on specific modules then it might help sway ED's hand to optimise (assuming it's not already planned and just waiting on resources)
-
You have completely missed the point of running the G2 at 60Hz, it means that you can easily achieve refresh rate VR (as it's meant to be) which is perfectly smooth with zero ghosting, artifacts or stutter. 90Hz with a 60fps framerate limit is below refresh rate so you will have the stutters and ghosting associated with it. Refresh rate flicker aside, 60Hz is identical image to 90Hz.
-
Leap Motion support in DCS is VERY disappointing.
edmuss replied to Woulve's topic in Virtual Reality
Read through the pinned leap motion thread in the input devices forum, lots of useful information in there. Best thing to do it turn off the laser pointers and flick switches properly (some are more difficult than others so keep the mouse cursor slaved to headset as a backup) and minimise IR reflective surfaces near where your hands are going to be -
OpenXR Guide - Deprecated - This time for real (▀̿Ĺ̯▀̿ ̿)
edmuss replied to nikoel's topic in Virtual Reality
Open composite still holds the fort for getting other sims (elite dangerous, dirt rally 2 etc) into openxr -
Operation Scarlet Dawn - Syria PvE Persistent Campaign
edmuss replied to Surrexen's topic in User Created Missions General
As an aside, the new MT update makes this run so much better in VR -
It's there on mine, perhaps check all of the options for advanced options?
-
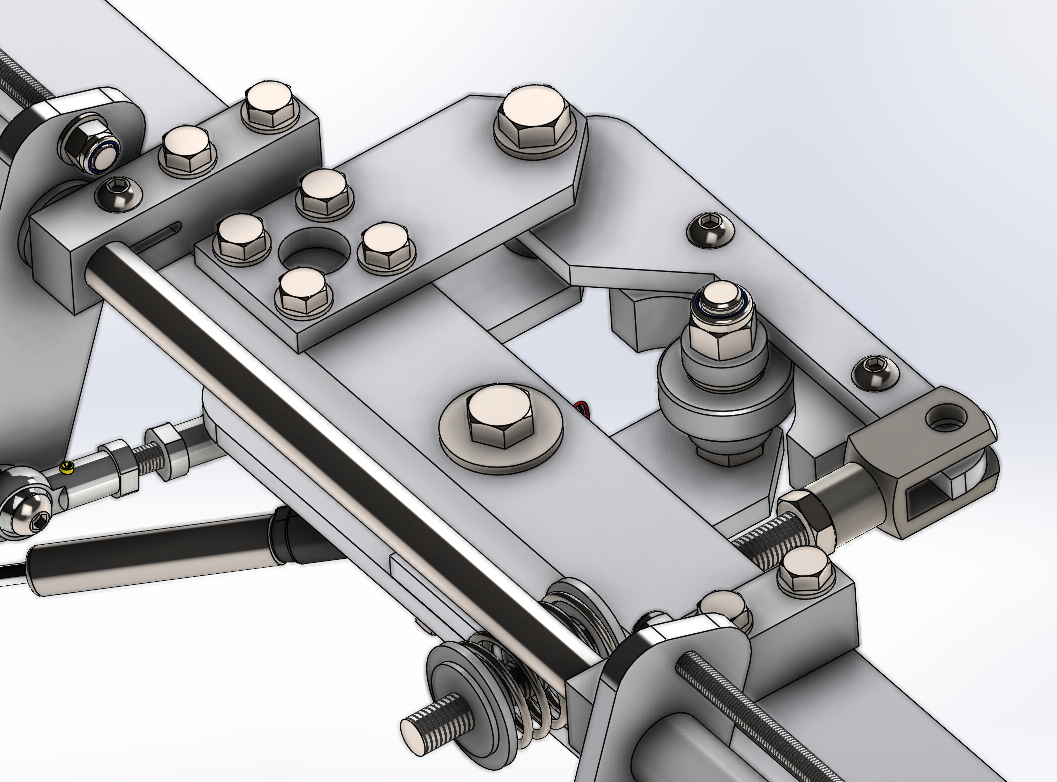
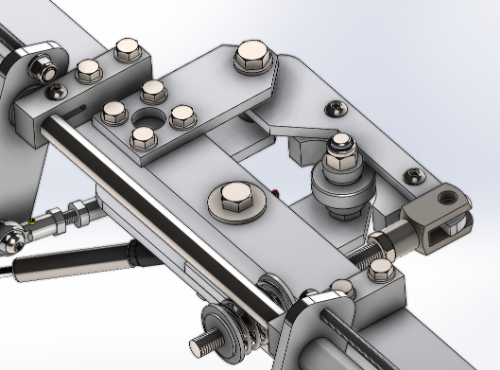
DIY Doorgun Project for VR use
edmuss replied to hannibal's topic in PC Hardware and Related Software
Thank you very much for the insight, I'll give the A1324 a shot edit: not a single place in the UK that has them in stock for less than 10 quid a sensor -
DIY Doorgun Project for VR use
edmuss replied to hannibal's topic in PC Hardware and Related Software
I might grab an allegro sensor from Leo Bodnar (3 quid with free postage as a test) to see if it gives a finer response. I would imagine that the sensors I have don't have an amplifier, they were about a quid each on ebay! I don't have a real world issue with the reponse I get from my rudder pedals, they seem plenty fine enough but more control can't hurt! If there is a significant difference then I'll invest the huge expenditure in the a full set of the allegro sensors for the collective (when I design it) and the rudders -
DIY Doorgun Project for VR use
edmuss replied to hannibal's topic in PC Hardware and Related Software
Might that be why I see quite a narrow range of input points on the sensors with my leo bodnar board? I typically see about 150 points delta in the controller calibration. Don't suppose you have an example of one with the built in signal amp? Lifted the below from datasheet for the hall sensors that Leo Bodnar stock, presume that the linear amplifier is the signal amp?
-
Both will bottleneck quite readily in DCS unfortunately. If you put a bigger GPU in then it will be held back by the CPU, if you put a bigger CPU in then the GPU will be screaming along and the CPU will (possibly) be idling most of the time. I would say you're probably pretty well balanced at the moment actually (for a relatively low spec DCS VR machine), ideally you want to be GPU bound as it's the end of the line before the headset and can't affect other components - if you're CPU bound then it can drag the GPU down with it. Using a performance overlay check your CPU and GPU frametimes, nominally if CPU is higher than GPU then you're CPU bound and vice versa.
-
Try right click on DCS.exe and "Send to..."-> "Desktop(create shortcut)". Or something along those lines
-
100W less for 3fps reduction isn't bad! I've not actually looked at the power reduction from undervolting my 3080ti, not sure it's that high, pretty sure I'm still pulling 320w out of it but that's not at stock clocks. What were the clocks like for the OC bios?
-
Out of interest I uncapped the framerate and started up DCS in pancake with my VR settings. At 1080p and my medium/high VR settings my 3080ti pulls 215fps in a purely GPU limited scenario (instant action BS3 take off on Syria). If indeed a 1080ti is pulling a delta of 60 to 200fps at 4k in any scenario then this is massive
-
DIY Doorgun Project for VR use
edmuss replied to hannibal's topic in PC Hardware and Related Software
I used hall sensors on my rudder pedals, my findings were set the magnet closest at your 100% deflection value and just calibrate from there (using a Leo Bodnar BU0836A in my case). Simply wired them up as per potentiometers. My implementation on the toe brakes is as above and it works better than my initial setup for the main rudder axis. For the main axis I used 1 massive magnet salvaged from an HDD and set mid point about the sensor, basically because the magnet is always present near the sensor it doesn't actually register a huge range of values. I think it's just the varying strength of the magnet that's giving different values when moved. When I get round to it I'll print off a mount which equispaces two smaller magnets which should give a better centre and a wider range of values. As they currently are they're phenomenal so it's not been an urgent requirement -
You cannot use native openxr with the stable release of DCS at this present time. Either switch to open beta or implement open composite which will allow you access to openxr toolkit
-
To be fair I coined those two acronyms almost a year ago, when you're formulating long posts like this it simplifies things greatly. I've seen both acronyms used in other places outside of DCS as well, whether they took these and ran with them or came up with the same of their own accord; it doesn't bother me and it's nice to have some continuity
-
You can set it in either place, I suspect that the OXRTK option will override the OXRDT
- 688 replies
-
- 2
-

-
- oxr
- openxr dev toolkit
- (and 1 more)
-
Also hope it gets an openxr implementation that's not tied to steamvr.
-
I saw this the other night and I'm intrigued No so much the additional heat in the headset though
-
DIY Doorgun Project for VR use
edmuss replied to hannibal's topic in PC Hardware and Related Software
For cabling have you considered cat5? Cheap (who doesn't have some spare cat5?), multi core and colour coded. -
DIY Doorgun Project for VR use
edmuss replied to hannibal's topic in PC Hardware and Related Software
Now I do have the Huey, and I am VR I have a list of other peripherals to design and make, ka50 abris controls is next on the list, then a ka50 collective. Depending on space and gimbal size I might be able to squeeze a door gun in my cupboard as well! -
DIY Doorgun Project for VR use
edmuss replied to hannibal's topic in PC Hardware and Related Software
What are you printing with? I've found that with esun PLA+ I can drill and tap threads directly into the print (just print at tap hole size) and they hold really well. Obviously the load on the fixing and amount of material affects the strength but I've been pleasantly suprised. Of course this is only helpful if you have a set of taps for the sizes you're threading! Awesome looking work so far though -
I really wish the hiding of the hands with control input could be disabled as an option. As a work around try setting a slight deadzone on your stick, it only needs to be a tiny unit to hide the hand. @BIGNEWYcould you possibly pass the above option onto the team? It's something of a superfluous mechanism now that we can manually disable each hand individually
-
Always the simple things Glad it's working now though.
-
I may well be wrong but from what I understand you can set certain layers/areas/textures to be excluded from the upscaling which helps prevent the blurriness. In MSFS this was the case with the blurring. It could be pointed out that currently with NIS/FSR upscaling via openxr toolkit the MFD text clarity doesn't start to suffer really (in my case) till you're below around 65% scaling; I would hope that DLSS when implemented will be an improvement on this
