Frederf
-
Posts
7593 -
Joined
-
Last visited
-
Days Won
3
Content Type
Profiles
Forums
Events
Everything posted by Frederf
-
Definitely a M5.1 tape thing, M4.2+ not so sure. EPAF had STRF on the MSL STEP rotary starting M1 but I don't think that was ever a USAF thing. Exact info would be welcome as this functionality appears to be changing during these years.
-

You can boresight Maverick without touching TGP.
Frederf replied to Marklar's topic in DCS: F-16C Viper
There might be a special logic when using TGP to boresight that's slightly different than plain SPI but it's not mentioned in pilot-facing documents. To him it is not his concern. One is absolutely able to calibrate missile boresight against simply the HUD TD box without TGP carried for example. Obviously if TGP handoff is anticipated boresighting against TGP is the smart action since there may be differences between TGP and other sources of SPI in terms of calibration. One thing that we should be aware of is calibration is parallax dependent, calibrating against a target 500' away and then trying to use against a target 30,000' away will give poor results even if using the same sensor, nevermind if calibration and employment sensor are different. Calibration instructions say to use EO VIS or EO PRE. I don't know if EO BORE won't work or is simply not recommended. -
FCR GM/SEA modes don't generate synthetic identifiers like GMT (hence the term GMTI). There are trackable "hot spots" called discretes in mapping modes but it's similar to Maverick video tracking, looking for the edges in a kinda analog type logic. Certain large targets (trains/ships) can frustrate tracking if the object is larger than the range resolution. It's stated that GMT mode can have superior detection capabilities to SEA of small/slow vessels. Selecting a target in GM/SEA requires the pilot recognizing the bright spot (or general landscape shape) on the image and slewing cursors accordingly. If the pilot wants FTT then designate with cursor over discrete although this is not commonly done, SEA mode disables drift detection for FTT although both GM and SEA can FTT moving ships provided the return doesn't degrade. There is no logically "stepping" through targets on GM/SEA or anything like that. If you want synthetic "logical" objects, you want GMT mode. Difficulty occurs with essentially stopped target vessels which GMT naturally disregards by its principle of operation. GMTT is done by designating from GMTI and the radar goes through an acquisition process for a moving target belonging to an indication in the previous mode at the cursor position. Slewing FCR cursor or FCR tracking in an AG/NAV preplanned mode should have all slaved sensors (i.e. TGP) forced to equal the radar's. This is the F-16's "single LOS" principle and it should be impossible to move or have tracking FCR while TGP is tracking simultaneously. Right now it doesn't and it's a known issue. The workaround is to keep cycling the sighting point (even if the label doesn't change) which will force the TGP to update LOS to the radar cursors at the moment of sighting point change. TMS up shouldn't cycle sighting point through OAPs, that would be TMS right on most SOIs (except for SOIs which use TMS right for something else). Anyway OAPs should not be in the rotary list if their RNG value in DEST is 0 feet which disables them from use.
-
Green light and sound above the Fuel quantity selector
Frederf replied to KenaiPhoenix's topic in DCS: F-16C Viper
Everything (maybe not some high priority alarms). Intercom from the back seat or AAR boom, all the radios, RWR, ILS, missile tone. Intercom is the "backbone" system that carries all (most?) sounds around the cockpit. It's the master volume knob. -
It should be known that there is SAM, TTS, DTS, DTT. "DTT" is the equivalent of STT for two targets, i.e. there is no search component. Dual-target SAM is when there are two tracks plus search component. Search component is dropped from SAM/DTS dynamically based on workload of radar. Releasing TMS forward in spotlight commands SAM acquisition (in RWS-not-SAM and ULS) although it may immediately go STT/DTT in conditions that SAM would go STT/DTT. Releasing TMS forward in SAM/spotlight with the SAM-bugged target under cursor would progress to STT. Another target from spotlight in SAM will designate a secondary SAM target and enter that mode. Releasing in SAM over nothing has no effect except ceasing spotlight. In VSR there's no SAM so it goes straight STT. In TWS I'm not sure, I think it goes straight to STT as well.
-
Green light and sound above the Fuel quantity selector
Frederf replied to KenaiPhoenix's topic in DCS: F-16C Viper
TF is for terrain following and has no function in the F-16. I think the ILS volume knob should also affect marker volume. In any case the intercom knob will definitely affect it. -
One interesting way to practice touchdowns is to approach, roundout, and fly as close to the runway and as long as possible without touching it. They fly away back to try again. On say the fifth time reduce power and settle onto the runway from flight just above it.
-
need track replay AR check on ground not possible
Frederf replied to Red Dog's topic in Bugs and Problems
Things that will make a track file large (apart from a lot of flight data) is a mission file which has big files (sound, pictures) or head tracking data from TrackIR/VR type device. -
Just how it works. Remove external tanks, refuel internal, add back full tanks.
-
If you want true min fuel you can set CRUS HOME for a waypoint thousands of miles away (to minimize the effect of the descent segment and finite trip length). It will change based on what SMS thinks is on the plane. In a way one could back-calculate DI with cruise info. It's a common error to climb too slow and steep. It's often better to get there early with an efficient climb and them hold at max endurance (if no threat). Less than 350 isn't good unless you have the draggiest load possible.
-
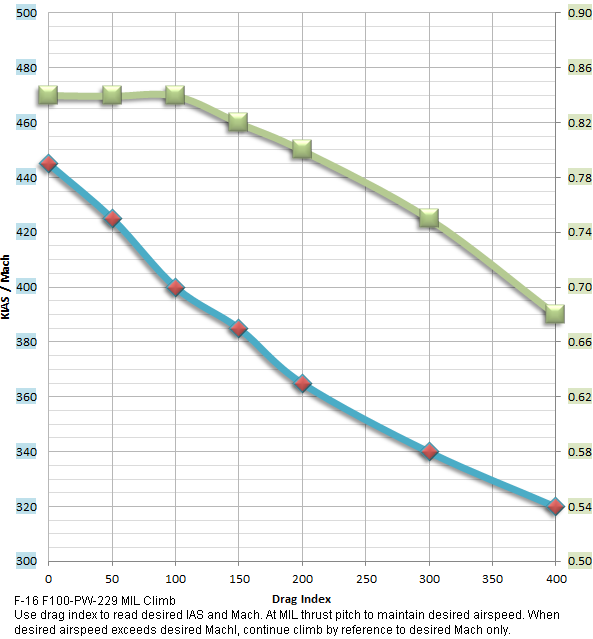
There are various optimum trajectories based on what parameter you're optimizing (minimizing), e.g.: Minimum time to climb (2) Minimum fuel to climb Minimum time to distance Minimum fuel to distance (3) Balance of minimum fuel and time to distance (1) The commonly defined climbs are the (1) MIL climb schedule, (2) MAX AB climb schedule, and (3) HOME schedule. As the name implies MIL/HOME schedule is the most efficient trade of fuel for position (range and altitude) and rely on using maximum dry thrust, aka military power, aka MIL power. In any jet airplane the most economical trajectory is at MIL power. The HOME profile is the actual (or best attempt) at minimum fuel and it's slower than MIL schedule. MIL schedule is slightly less economical than true minimum fuel but it's faster. They figure out how to use 103% or 110% or whatever of the true minimum fuel required and then figure out how fast can it be done with this reduced economy. So instead of climbing at 330 knots for 100% minimum fuel burned you climb at 440 knots for 105% (numbers for example only). MIL climb is based solely on drag index. More drag, more slow. I made a cheat sheet because it's faster to reference than the manual's big diagram. From drag index at bottom go up to the blue line and look left for airspeed, look right for Mach. To do the climb put engine in MIL and pitch to do the lower of the two speeds (airspeed will be lower to some altitude then follow Mach). For MAXAB climb (usual for interception mission getting up high fast) it's about riding the PSmax curve which is essentially M0.9 always so just full burner and pitch for M0.9. The fun one is to get a friend at 200 knots, 10,000' right beside you and have a race up to 35,000'. He will start climbing and you will descend first (to get on M0.9) and still beat him to altitude.

-
Kollsman window and knob is just the name of the dispay that says 29.92 (or whatever number) and the knob that changes the value shown in the window. F-16 and really most modern Western jets aren't designed for QFE altimeter reference. Even Soviets which commonly used it and have special altimeters that could be adjusted really low sometimes couldn't set 0 height at high airports.
-
Please left and right TEDAC triggers as axes for those with controllers
-
This can happen if you connect a full external tank when there is internal space, takes about 16 seconds.
-
Nebo radar uses VHF, L, and X. VHF is too low for HARM but L and X is not.
-
In the GND SPD switch mode it changes to INS GS for speed and also INS track (instead of heading) for heading. CAS: speed KCAS, heading magnetic TAS: speed KTAS, heading magnetic GND SPD: speed INS ground, ground track The heading tape HUD element can (will) change switching between CAS/TAS and GND SPD but will never change switching between CAS and TAS.
-
All airplanes have a U-shaped power (thrust) required curve. It depends on your drag and weight but even relatively fat/heavy at 25kft best endurance would be 350-370 KTAS (240-255 KCAS). You would be on the normal side of the curve although not by a bunch. The throttle position sets the fractional power between minimum and maximum so the same position isn't the same power if conditions have changed. It's possible to be "behind the power curve" (e.g. normal landing approach). Every thrust has two equilibrium speeds where forces cancel. At high thrust these speeds are far apart. As thrust decreases these speeds come together and at th minimum level flight thrust the high/low speeds are the same number.
-
Starting on outer tanks is a good way to test that they satisfactorily feed the engines in a safe environment. You don't want to learn about fuel tank feed problems mid flight. This also removes some fuel from the outer tank system so later drop tank transfer is less likely to vent fuel overboard. There also may be some benefit (requirement?) to ease of engine starting as priming uses the outer fuel system. Warming up on main fuel may be an early check of that system.
-
weird interaction of static and dynamic weather tabs
Frederf replied to skypickle's topic in Clouds & Weather System
Every time you change weather systems from static/dynamic the pressure centers randomization "dice" are re-rolled. It's not that changing static overwrites anything but that switching the mission out of dynamic weather and back in (even if no changes) will get new dynamic values. -
It's normal for the "shout out the window" communications to stop working under some conditions. Engine noise, canopy state, airborne, etc. can determine if communication is successful. You can always try on the ground (menu opens). The basic comm window won't even open while airborne.
-
DBS1 patch size (miles x miles) is based on scale option. That may not be the same as resolution (feet per pixel). One of the reasons for the 1500' staple is how dynamic the image sizing can be.
-
Upcoming Updates Video (19 Aug) on Spotlight Scan Radar Mode
Frederf replied to GrEaSeLiTeNiN's topic in DCS: F-16C Viper
Wanted to ask you, beyond the probabilistic aspect is there any cooperative aspect to multiple scans. Returns are not binary in themselves, there's energy and noise level to distinguish itself from. Can multiple returns which individually don't meet requirement for being a detection collectively become a detection? -
They are described quite well here: For level drop in CCRP just ignore the toss cues and drive straight forward. When caret = bottom of scale and timer = 0:00 level release should happen.
-
TM Warthog whats wrong with this script?
Frederf replied to Steel Jaw's topic in Controller Questions and Bugs
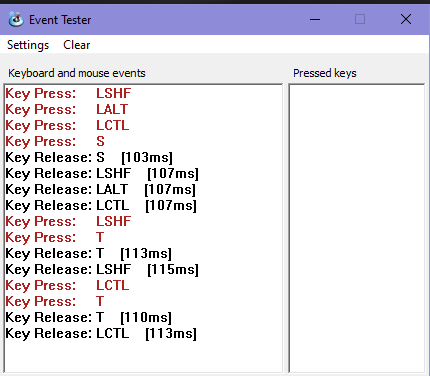
D() does the default SetKBRate(A, B) "B" value for delay and the "A" value for pulse. By default it's 50 miliseconds so watch out that's very fast. Some programs can't recognize things that fast. Consider specifying larger times like 100 or 250ms at first to confirm things work with longer times. As for the LED 5 lights, they only work if the whole device backlights are on first. When I first plug in the device it's backlight on and specific 5lights will work but if I turn backlight off then everything is always dark. Your SMOKE MapKey isn't formed right with the extra , 0 between the button name and ouput. Untitled.tmc Here's an example that seems to work as I think you intend. LED5 comes on only with PSF.
-
yes a few things, strafe, Mavericks, HARM, confirming visual AIM-120 launch, and laser tracker.