wowbagger
-
Posts
932 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by wowbagger
-

The rudder yaw that keeps from flying straight
wowbagger replied to FoxxyTrotty's topic in Controller Questions and Bugs
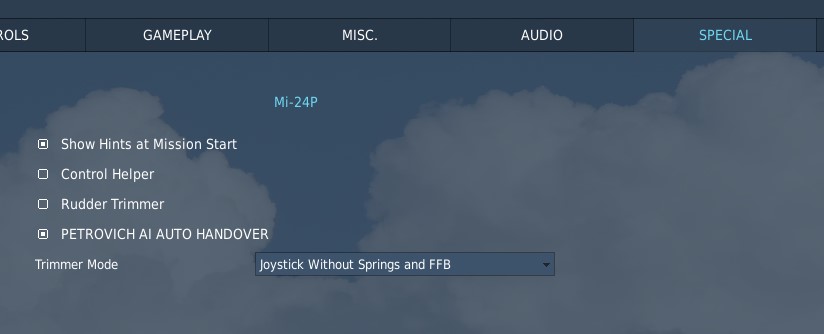
I've never tried the Joystick Without Springs and FFB trim setting ... because I have springs. But when I say 'immediately return to centre', I'm talking very small movements and corrections. It's not a big deal really. I think it's just a matter of practice (it hasn't been out for even 24 hours). Don't expect it to behave like the Ka-50 or the Mi-8, it doesn't. It has its own quirks and idiosyncrasies. Big torque changes require a LOT of compensation in the other axes. You must be proactive, not reactive, or you will end up in a broken fiery mess - but this makes it so much fun and engaging to wrangle around the skies. It is the polar opposite of FBW+HMCS+MFDs. It's easily my favourite helo to fly and probably my favourite module in DCS. I think the devs did an incredible job with her.
-
The rudder yaw that keeps from flying straight
wowbagger replied to FoxxyTrotty's topic in Controller Questions and Bugs
I checked and apparently I have curves of 9-11% on all axes at the moment. I find the Mi-24 fairly pitch sensitive. -
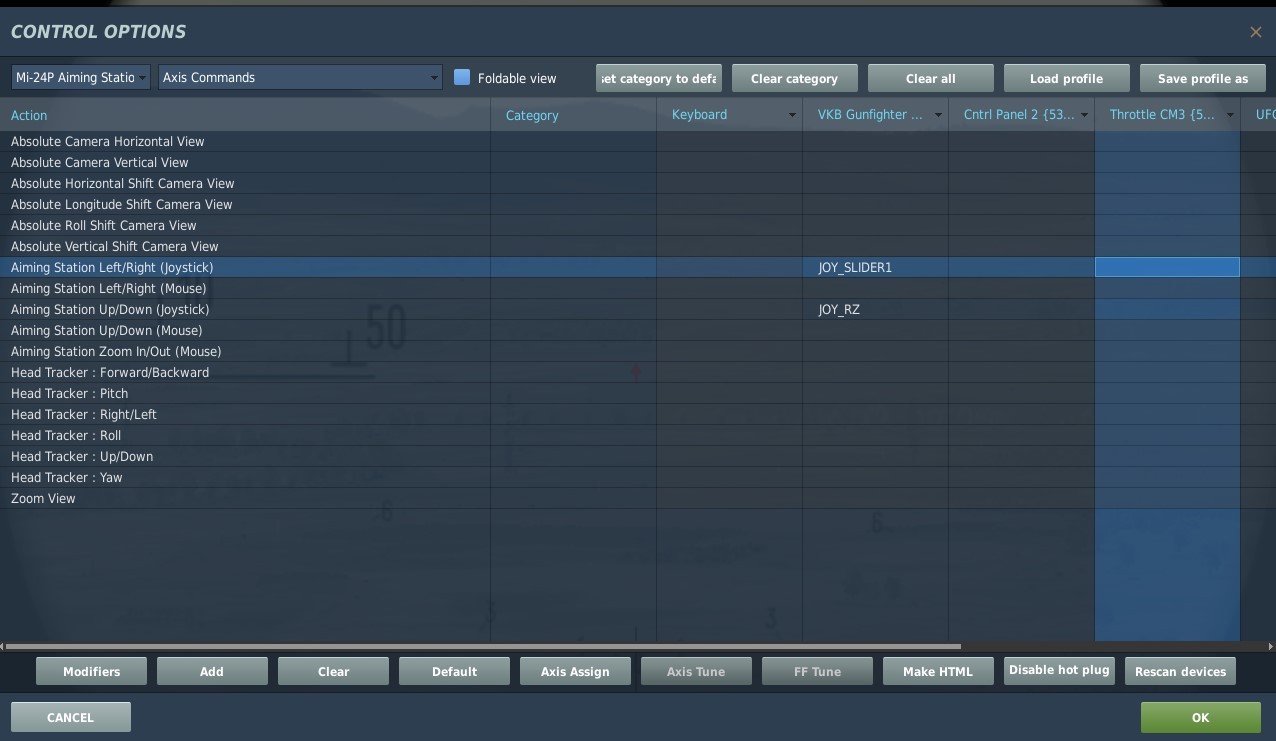
Can you check your controls and post a screenshot of this please:
-
Problems with Pedals? (Slow response)
wowbagger replied to Lurker's topic in Controller Questions and Bugs
Yes, I think you may be over thinking this. The pedals always behave as if they have inertia. Moving your controller pedals quickly from stop to stop will show the in game pedals moving much more slowly, trying to keep up with your inputs. However if you make small, considered movements on your controller, as you would when flying, the in game pedals mirror your movements. Secondly, you are correct. The YAW AP channel will, when enabled, adjust the anti-torque automatically to compensate for changes in torque demanded by the collective - and hence move your pedals without you doing so physically. - Open the mission and set the Hind somewhere - take off hot from ground. Try moving your own pedals stop to stop and watch the in game pedals. Then try moving the pedals in slow, incremental movements and see how the in game ones behave. - Then, with the YAW AP channel active (green light on) try a hover check without touching your own pedals, but increasing the collective very slowly and gradually, giving the YAW AP channel time to adjust. Watch what happens to your pedals. Next disable the YAW AP channel and try the same thing .... then hit restart or end mission. -
The rudder yaw that keeps from flying straight
wowbagger replied to FoxxyTrotty's topic in Controller Questions and Bugs
I trim by getting into a stable flight configuration for where I want to go and then clicking and releasing the trim button (and immediately letting my physical controls return to centre) to hold the virtual controls in that position. I usually don't run any curves for helos, but I may have applied some for the Hind ( I'll have to check), she is very sensitive, especially if you turn off the AP channels. -
no bug Weird Controls on Mission Start
wowbagger replied to WolfK33's topic in Controller Questions and Bugs
Try enabling Sync Controls at Startup in the main options window? (I forget the actual name of the setting at the moment.) -
correct as is Cannot fire rockets if also equipped with guns.
wowbagger replied to deathbysybian's topic in Bugs and Problems
Are these presets from the mission editor or custom loadouts? -
Nice! Excellent write up. Thanks for this. One thing I've found is that the Mi-24 autostart will abort with "CHECK FUEL QUANTITY" for anything less than about 38% fuel. Just something to keep in mind.
-
Yes, I made a mod to do that because it annoyed me as well. Just make a blank file called StatusBarDialog.lua and put it in DCS/Scripts/UI, overwriting the original (at your own risk). This will remove it entirely - not just turn it off by default. So if you want to be able to turn it on and off, don't do this. Obviously, it will get replaced with the original during each update so use OVGME as with any other mod. There's a probably a far more eloquent solution to this, but this was my quick and dirty answer to the distracting status bar.
-
Yep. And check out the cockpit reflection in the light cover to the right of the fan. They clearly put a lot of love and detail into this one.
-
Good stuff. Thanks for letting everyone know the solution.
-
correct as is Full weapons loadout total Hind weight exceeds 100%
wowbagger replied to Mac D's topic in Bugs and Problems
I think it's not a bug. The Hind can handle more weight if using rolling takeoffs and landings. So Minimum Takeoff Weight and Operational Takeoff weight vary depending on the mission profile. -
cannot reproduce and missing track file yaw to the left on hover
wowbagger replied to Japo32's topic in DCS: Mi-24P Hind
I always reset trim when coming to a hover so that I'm not fighting against a flight configuration that the AP is trying to maintain. Do it early on, so that you don't have a sudden control change when you're trying to find a good hover balance. Hovering in the Hind requires a lot more finesse (for me) than the other helos. It's a heavy bird that is designed to fly fast. Edit: If you think something is amiss, post a track file so someone can take a look. -
Fear the Bones! - Campaign Info
wowbagger replied to Reflected's topic in F-14A Fear the Bones Campaign
Haha! Love the trailer music and the video game cover. As soon as I can find my skinny tie and leg warmers ... and finish watching Magnum PI (today's Thursday after all)... I will be all over this! -
The sight has a separate controls scheme from the Mi-24 itself. If you look under controls you will see one for the Mi-24, one for the sight, and one for the AI. Select the control scheme for the sight and see what is bound under the axis settings.
-
Problems with Pedals? (Slow response)
wowbagger replied to Lurker's topic in Controller Questions and Bugs
The damper switch (off) gives you more control while you are taxiing. However once airborne, you should turn it on( ie, close the cover), and the damping system shouldn't hamper your control of the aircraft at all. When you said it was unusable, did you mean you couldn't control the aircraft, or just that, looking at the pedals themselves, they didn't seem to respond visually to your inputs as you would expect? Give it a try when you get home. Turn the damper switch off for taxiing, leave it on for hover check, hover take-off, and flight. Also make sure to enable the YAW Autopilot channel for hover check, hover takeoff, and flight. It makes a big difference in stability. Oh, and go very easy on the collective, the Autopilot channels need time to react to torque changes and if you move it too quickly you will just shoulder over into a rotor strike. -
You're definitely trying all the correct things. Have you tried renaming/moving your Saved Games DCS folder and letting the game create a new one temporarily?
-
If you are asking for help, it's always wise to remember you have to supply a trk file. Otherwise it's impossible to see where the problem might be. Keep in mind that the Hind has been test flown by many people for a while, so if there is some major unannounced show stopper for you there is a good chance it is a simple configuration issue, or user error. Those things are easy to find from a trk file, almost impossible to guess without one.
-
Problems with Pedals? (Slow response)
wowbagger replied to Lurker's topic in Controller Questions and Bugs
But the damping system shouldn't doesn't make it "unusable". -
Problems with Pedals? (Slow response)
wowbagger replied to Lurker's topic in Controller Questions and Bugs
Did you check if the anti-torque pedal controls are double bound (ie assigned to more than one controller axis)? -
DCS: Mi-24P Hind ('Hey Comrades')
-
I'm getting 8-10 fewer FPS in the Hind vs the Huey (flying over Cyprus).) edit- Meaning I'm not experiencing any framerate problems with the Mi-24, if that was unclear.
-
DCS: F-14 Development Update - Bounce, Burble and Orbits!
wowbagger replied to Cobra847's topic in DCS: F-14A & B
Awesome update HB people! Very nice work. -
Don't forget to change VA settings too.
-
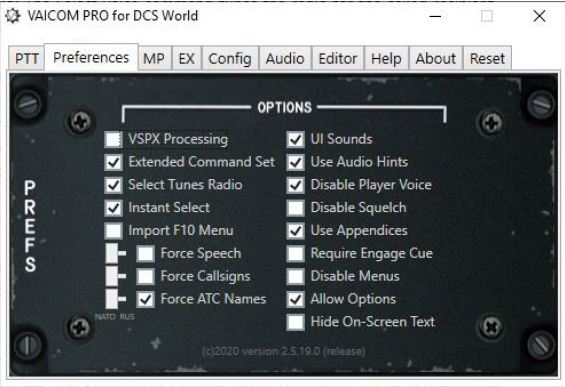
Have you guys tried switching the VSPX Processing either off or on to see if your recognition improves? Prior to the latest update I changed that and it greatly improved recognition for me.