Leaderboard


Popular Content
Showing content with the highest reputation on 05/26/24 in all areas
-
New Features/Additions: New Engine behavior. Thrust has been adjusted as well as fuel consumption. Turbine cooling is enabled based on the position of the throttle Long awaited revamp of Sideslip force for EFM. Plane will now behave more realistically in bank Reworked nozzle open close behavior. It is now more akin to real life Added R-37M Hypersonic Air-to-Air missile to Su-30SM Updated textures for some weapons Bug Fixes: Fixed CTD due to recent DCS update Fixed Ships/Ground unit disappearing Fixed some AG Pylons incorrect position Have fun.15 points
-
Just had to make this video11 points
-
It's because I always try to emulate the real thing as close as possible. This often means I have to be creative with the tools I'm given. This also means I often have to use the more advanced parameters. In this case it's the thrust vectoring parameter that has changed in the core game missile API. For example, my Tor actually cold launches its missiles, like it should, but this is only possible thanks to the more advanced missile parameter setups. That's why I sometimes ponder if I should stick to the older and more basic setups, in order to avoid these issues. But in this case we can see that the most basic missile parameter setup has been even more affected (that's why the HIMARS, YJ-21, GPS-guided shells etc aren't working). So my conclusion would be to just continue as is, and repair stuff when this happens. It's not like the 3rd parties are unaffected of core changes, just check Dekas changelogs about missile changes over time.11 points
-
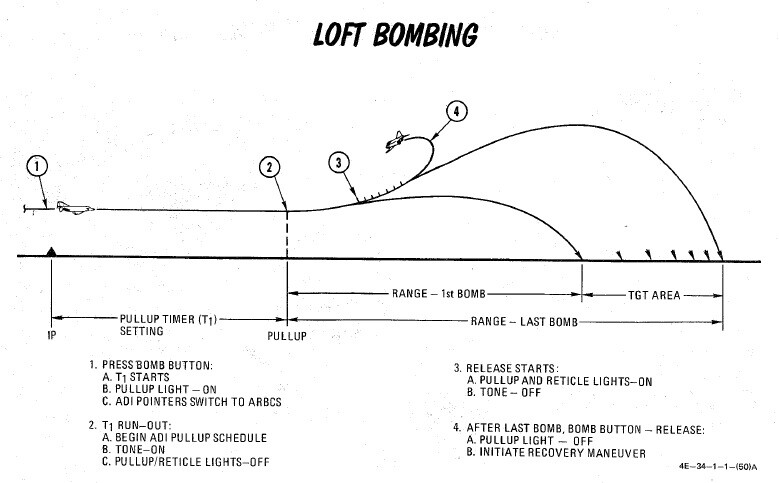
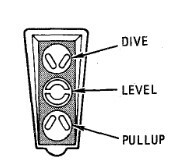
So you would like to shoot the AGM-45 Shrike off of your shiny new Phantom and LARP that you are an F-4G or a Wild Weasel of yore. The first thing thats probably on your mind after playing around with it is probably “this missile is broken” and “how the hell does it work even”. Hopefully this guide can help clear up some of the confusion about the original Wild Weasel anti-radiation weapon and help you figure out how to use it in DCS. How the AGM-45 guides Everybody is probably wondering about the new seekerheads you can select with the arming and rearming menu, but first lets start with the basics. How does the AGM-45 actually fly to its target. “Its just an ARM” you say, “if it sees the emission of its target it should guide on it.” Yes and no. There are several things that have to occur for the shrike to guide. Lets start with an overview of the Shrike itself. The seeker The seeker is a passive Radio Frequency seeker that has a 45 degree field of view in DCS and a 150 second operating time, the seeker is on once the shrike is armed and will give you a high pitched tone, similar to a sidewinder, that indicates when it is tracking something inside its field of view. This tone may stutter or change as the emitter that the seeker is tracking rotates or changes modes. Once launched the seeker is always tracking or attempting to track something that it can see within its field of view. Guidance control The guidance control section is the “autopilot” that gives the commands from the seeker to the fins to steer the missile. This section is not enabled until after launch and certain conditions are met. You can choose the conditions that will enable the guidance control by selecting LOFT ATTACK or DIRECT ATTACK on the rearm fuze selection menu, or in the mission editor. You cannot change these via switchology in the jet (there is an exception but it is not implemented yet. If this changes I will update this to represent this) LOFT ATTACK: This is the most complex set of conditions to enable the guidance control section. The conditions are: Missiles barometric altimeter detects a pressure increase of 1 PSI (~1-3000 feet depending on altitude and temperature) Missiles barometric altimeter sense that the missile is below 18,000ft MSL ONCE BOTH OF THESE CONDITIONS ARE MET THE GUIDANCE CONTROL SECTION WILL UNLOCK and the signals from the seeker will be sent to the control section and the fins. Until these conditions are met the missile will be flying completely ballistic and unguided, even though the seeker may see and be tracking the emitter the entire time. DIRECT ATTACK: With this selected the altitude sensor for the loft attack is bypassed and the guidance control unlocks approximately 3 seconds after launch. This is your “shoot it straight down the throat” guidance control selection. The AGM-45 will naturally roll at approximately 55-60 degrees per second, and the guidance control system does not attempt to stop this once it enables. Additionally the fins only actuate with BANG-BANG control inputs, which you can watch if you observe the missile via F6 after launch. All of this is to say that once the guidance enables the AGM-45 will be corkscrewing and its fins will be BANG-BANGing constantly, which results in a very high potential energy loss once guidance begins. What all this means for employment and range DIRECT ATTACK guidance missiles will have VERY short range, and the depression angle is very important, the more the missile has to glide to the target, the more likely it will just run out of energy and fall extremely short. Recommend trying to fire by getting 20 degrees or more nose down pointed straight at the target, or being right on top of it if firing at low altitude. Both of these will result in very short ranges. LOFT ATTACK guidance however can get quite good range if lofted accurately. The fins remaining locked and the missile flying ballistic until guidance enable allow it to retain much of its energy and usually results in a fairly steep (30-45 degree) descent angle when it enables guidance. However remember that the seeker only has a 45 degree field of view, and the target must be inside that field of view when the guidance section activates (below 18,000 feet and missiles altimeter detects a 1 PSI pressure increase). This means you have to actually get that missile quite accurately to a window above the target when the seeker activates where it can detect it and guide. You can employ a LOFT ATTACK shrike directly pointed at a target or level (not in a loft) as well, and it will get more range due to the fins staying locked for longer, however the missile will not start guiding till much later, so for short range immediate guidance scenarios it may not be the best. With all of that How do you shoot the Shrike in the F-4E Ok so you understand what the DIRECT and LOFT ATTACK modes do, and what the up and downsides of each mode are and what effect they have on the missiles guidance and energy. Now we get to how do you actually Use them in the F-4E. There are 3 modes you can use to employ Shrikes in the F-4E: LABS Loft WRCS Direct WRCS AGM-45 We will cover these three after going through the basic cockpit setup. Basic cockpit switch setup For all these modes you must: Select the station for the shrike(s) you wish to employ Select ARM on the weapon select knob Select one of the 3 modes on the LABS/WRCS knob (LOFT, DIRECT, or AGM-45) (optional) Turn the Flight Director on (if you want the needles on the ADI indicating shrike seeker look angle) (optional) select A/G on the Sight Turn Master ARM on LABS Loft Selecting LOFT on the LABS/WRCS knob will allow the LABS LOFT circuits to fire the shrike automatically. However this works Exactly Like it does for bombs, it simply applies the launch signal to the shrike launchers, instead of a release signal to bombs. So it is setup and used the exact same way. You will need to plan out an IP, a run in time to your loft point, and pick a loft angle, enter them in the LABS computer and timer in the backseat. Once these are entered, you then overfly the IP, hold the pickle button down, point at the target, and follow the ADI needles, as you rotate through the preset loft angle with the pickle button held down, after the expiration of the run in timer, the missile will depart the jet. This mode obviously requires preplanning, and the ability to know ballistically what angle you want to release the shrike at, and at what range to start the loft, and then use this to enter in the run in timer, select an IP and pick a loft angle. None of this is calculated for you, so only via trial and error and practice will you be able to figure out what settings will work for you. For more information about Loft you can also take a look at our manual: Lofting & Tossing WRCS DIRECT Selecting DIRECT on the LABS/WRCS knob makes the selected shrike launch approximately 1 second after you hit the pickle button. That's it. Center up the needles, or dont center up the needles, pickle and the shrike will go on its merry way. There is zero automation, so if you desire to fire the shrike in a loft, you will have to manually pull up based on your own practice and situational awareness. There is also no indication that you are in range or out of range. WRCS AGM-45 Selecting AGM-45 on the LABS/WRCS knob is the “preferred” way of employing the shrike, it will give you ranging indications for the shrike and let you know if you are in range to loft, perform a level release, or a diving release of the shrike. If you want to perform a loft or level release with this mode, you should be using a LOFT ATTACK shrike. The WRCS has no way of knowing which type of seeker guidance you have selected and will always be calculating assuming the LOFT ATTACK logic is occuring. Thus if you fire a DIRECT ATTACK missile following the loft or level release cues, it will probably start guiding immediately, and fall far far short of the target. WRCS AGM-45 makes use of the “target altitude” setting in the computer panel in the WSO cockpit to trigonometrically calculate a ground range to your INS depression angle as displayed on your ADI. Any time your nose is below the horizon it should be calculating the range to where the ADI depression intersects with the set target altitude, if you would like your reticle to match, you need to have it depressed by 35 mils. For the most accurate ranging you will want that target altitude set to a representative altitude of the theater or target area you are pointing at. One interesting use of this is even if you have no shrikes on the aircraft you can select this mode, and if you depress the reticle 35 mils, you can use this to get a range to locations on the ground by pointing at them with the reticle (assuming the target altitude setting is relatively accurate.) This range should be displayed on the range readout on the HSI any time the nose is below the horizon and the calculation is running. The max range this system can calculate out to is 30 miles. This is a limitation of the WRCS, it will not display a range greater than 30 miles. As soon as it calculates a ground range the WRCS will calculate if you are in range for a shrike and if you are in range for a loft, level, or diving release. Indication that you are in range will be one of your AOA indexer lights lighting up to indicate which of these deliveries are available to you. The indications you could get are: Out of range, no lights light up In range with a loft, upward pointing chevron illuminates In range for a level launch, donut illuminates In range for a diving direct launch, downward pointing chevron illuminates Remember these indications are based on your current nose depression angle, and will be calculated and displayed regardless of whether your shrike sees anything, or even if you have a shrike on the aircraft. Only one of these should turn on at any time until you pickle, once you pickle and hold the donut will eventually illuminate to inform you the launch is about to occur. Just to visualize this, if you start out of range to a threat, and fly towards it, with the nose pointed at the target (in a dive), first the loft cue (upward chevron) will illuminate as you get into range for a loft, then once you are close enough for a level launch, the upward chevron should go out and the donut should illuminate. Once you are too close for a level launch and approaching minimum range, the donut should go out, and the dive cue (downward chevron) should illuminate. If you get too close for that, then all the indexer lights should go out. To use the system, select a shrike and point towards a target, once you get a signal and the needles deflect, center up the needles, once you have the needles perfectly centered in your ADI, your ADI should be directly pointed at the targets location and assuming your target altitude in the rear cockpit is somewhat accurate, the calculated ground range and LAR should also be fairly accurate. You could also do this if you visually see a target SAM site or SAM launch, if you know the type and have the correct type of shrike seeker selected, with your reticle set to 35 mils (matching the ADI boresight) you can put the reticle on the target SAM to get your dip ranging as well. Once you have an in range indication (one of the AOA indexer lights has illuminated) with the ADI or depressed reticle centered on the target location. Pickle and hold as you maneuver for the release. Pickling will save the range calculated and start the release computation for the shrike. Remember to continue to hold the pickle button down as you fly the launch maneuver and until the missile leaves the jet, this can take several seconds. If you elect to do a loft with the upward chevron illuminated, pull up keeping the vertical needle centered while holding the pickle button, the donut will eventually illuminate to let you know that the missile will launch in 5 seconds assuming no parameters change. If you continue to pull up after the donut illuminates, it is possible for it to launch sooner than 5 seconds as the parameters are changing after the donut illuminates. If you elect to wait until the donut illuminates and perform a level release, simply hold the pickle button and pull to level, the donut should remain illuminated and within 5 seconds the missile should launch. If you wait until the dive cue is illuminated, keep the target centered in the ADI needles, pickle and hold, the donut should illuminate and the missile should launch within 5 seconds. The DF REJ switch on the center pedestal should remain in DF REJ (down), this uses the very accurate INS depression angle (requiring you to dip your nose to align the needles on the ADI) to calculate the range. NOT IMPLEMENTED CURRENTLY-DF REJ is always used regardless of switch position You can also move the switch to NORM (center position) This will then just use the raw shrike seeker depression angle in the same calculation, not requiring you to dip the aircraft's nose. However, the shrikes seeker depression angle is very inaccurate, and this will more than likely result in gross ranging errors which can result in your missile going too far or too short and never finding the target. NOT IMPLEMENTED CURRENTLY-DF REJ is always used regardless of switch position The recommendation from the real world manuals and how heatblur have modeled the shrike seeker indications in the cockpit is to leave the switch in DF REJ and perform the dip ranging maneuver before launch. Gotchas The LABS/WRCS knob has ZERO effect on whether the AGM-45 performs the LOFT ATTACK guidance enable logic or the DIRECT ATTACK guidance enable logic. This can be the source of much confusion. You could choose LOFT on the LABS/WRCS knob, and fire a DIRECT ATTACK shrike, it will then enable guidance 3 seconds after launch, and pull down out of its loft to track the target it sees. You could choose DIRECT on the LABS/WRCS knob and fire a LOFT ATTACK shrike, it will then follow the LOFT ATTACK guidance enable logic detailed above, enabling below 18,000 feet and after detecting enough of a descent. The other thing is there is very little actual automation or computation with either LABS LOFT, or WRCS DIRECT, you are essentially doing all of the planning or in range assessment yourself in these modes. Practice will be necessary and some trial and error to determine what altitudes, loft angles, and ranges will work. Seekers The following table will help you understand which seeker can sense which radar. The above table is confirmed guidance for various seekers. Thank you to Jusik for testing which seekers work. MK 37 for SA-3 is not confirmed by testing. Sources F-4E-34-1-1 1986/1995 F-4G-34-1-1 1985 AGM-45-7A SHRIKE. FINAL TEST REPORT McMaster; 1977 ( https://scholarworks.calstate.edu/downloads/th83m2998 ) https://www.youtube.com/watch?v=eqxfNAEkQo8 IRON HAND: Smashing the enemies air defenses, Thornborough; 2001 DCS weapons lua
 8 points
8 points -
What does SA-2 on its own refer to in the table? The Shrike's Mk 25 being the only one that works against SA-2 (TR) (i.e. the Fan Song E) makes sense, but the Mk 22-Mk 24 doesn't because the Fan Song we have in DCS is the Fan Song E, which operates in the G band. Fan Songs that operate in the E/F band are the Fan Song A, B and F. Speaking of which, it might be useful to have a threat guide in the manual for the radars in DCS, including their frequency and band where known. A list of what frequencies that correspond to what bands can be found here (you're after the new nomenclature). Though, I guess it also depends on how well DCS models it. The other thing is that some radar systems in DCS are actually a combination of radars which may operate on different bands (Straight Flush, Land Roll, Scrum Half and Hot Shot being primary examples). Also, some radar systems comprise of multiple radars, such as the 1S91 [Straight Flush], whose 1S11 acquisition radar operates in the C band, but its 1S31 tracking/illumination radar operates in the I band. Meaning that the Mk 49 and Mk 49 Mod 1 would only work against the Straight Flush in its track/illuminate mode. The Mk 37 might work (purely looking at the band) In any case, I'll list Eastern Bloc radars below and I'll bold what guidance section is appropriate, based on the frequency, which I'll write in bold. At the moment, for the table in the fusing GUI. 1S91 [Straight Flush] is the acquisition, target tracking and illumination radar for the 2K12 Kub [SA-6 Gainful] 1S11 acquisition radar operates in the C band. Mk 37 EDIT: This one actually has contradictory information, while this says C band, this says G band. If it's the former, the Mk 37 is accurate, if it's the latter the Mk 22, Mk 25, Mk 50 is accurate. Neither cite anything though and there's a non-zero chance the former could be mixing nomenclature (the C band in old nomenclature is G band in the new one). 1S31 track/fire-control radar operates in the I band. Mk 36, Mk 49 As above, while this says I band, this says H band if the latter is correct, it means the Mk 49 (either mod) or the Mk 50 is accurate. SON-9 [Fire Can] is a fire-control radar for AZP S-60 and KS-19 AAA batteries. It operates between 2.7 and 2.86 GHz (E band) Mk 23, Mk 24 SNR-75 [Fan Song] is the fire-control radar for the SA-2. In DCS we have the Fan Song E, which operates in the G band, at around 5 GHz. Mk 22, Mk 25, Mk 50 (Edit 3 - this appears to be the case in DCS). SNR-125 [Low Blow] is the fire-control radar for the SA-3. This operates at around 9 GHz, in the I band. Mk 36, Mk 49 The P-15 Danube [Flat Face A] is an acquisition radar mostly associated with the SA-3 (though is also used as a general purpose search radar, particularly for the Army), in DCS we have the updated P-19 [Flat Face B], which operates in the C band, at 0.83 - 0.88 GHz. Mk 37 The P-35 [Bar Lock] is primarily an EWR/GCI radar, which operates in the E/F band. Unfortunately, it doesn't exist in DCS (though given how prolific and how well it fits in with our maps and aircraft and the fact we have an appropriate model for it, it really should). Mk 23, Mk 24, Mk 50 As for other Eastern Bloc SAMs and radars: 2K22 Tunguska (2S6) [SA-19 Grison]: 1RL144 [Hot Shot]: Acquisition radar operates in the E/F band. Mk 23, Mk 24, Mk 50 Track/Fire-control radar operates in the I/J band. Mk 36, Mk 49 - Note, wiki (citing C:MO) describes this as a J band system, which would put it beyond any of the shrike guidance sections. 9K33 Osa [SA-8 Gecko] - Land Roll (unknown native deignation) Acquisition radar operates at about 7.5 GHz, which is in the H band. Mk 36, Mk 49, Mk 50 Track/Fire-control radar operates at 15 GHz, which is in the J band. None of the Shrike guidance sections can target this. 9K35M3 Strela-10M3 [SA-13 Gopher] This one is quite difficult as some sources refer to its radar as Hat Box or 9S86 [Snap Shot]. The latter allegedly operates in the mmW range which is in the K to O bands (30 - 300 GHz), which is beyond what any of the guidance sections can target. 9K37M1 Buk-M1 [SA-11 Gadfly] 9S18M1 [Snow Drift] SR operates in the F band. Mk 23, Mk 24, Mk 50 9S35 [Fire Dome] tracking/illumination radar operates in the I/J band. Mk 36, Mk 49 9K330 Tor [SA-15 Gauntlet] - Scrum Half (unknown native designation): Acquisition radar operates in the E/F band. Mk 23, Mk 24 Engagement radar operates in the G band. Mk 22, Mk 25, Mk 50 S-200V Vega [SA-5B Gammon] 5N62V [Square Pair] FCR operates at 6.6 GHz, in the H band. Mk 49, Mk 50 At the moment the P-19 and 5N59S are used in DCS (though neither are accurate). The actual acquisition radar used for the S-200 is the 5N84A (P-14F) Oborona-14 [Tall King C], which operates in the A band, below the range of the Shrike. S-300PS [SA-10B Grumble]: 5N59S [Tin Shield B] SR operates in the E/F band (2.85 - 3.2 GHz). Mk 23, Mk 24, Mk 50 5N63S [Flap Lid B] FCR operates in the I/J band. Mk 36, Mk 49 5N64S [Big Bird B] SR operates in the E band. Mk 23, Mk 24, Mk 50 5N66M [Clam Shell] SR - this one has contradictory information, this says it operates in the I band but this says it operates in the E/F band. Mk 36, Mk 49 for the I band, Mk 23, Mk 24, Mk 50 for the E/F band. EDIT: Forgot the ZSU-23-4, its RPK-2 (1RL33) [Gun Dish] operates at around 15 GHz, in the J band. This is above all of the Shrike's guidance sections - none of them should be able to target it. I also forgot the 1L13 and 55G6, but both operate well below any of the Shrike's guidance sections can target (A/B band). EDIT 2: I also forgot the 9S80M1 (PPRU-M1) [Dog Ear] - sorry everyone. That radar is commonly associated with shorter-ranged army systems like the SA-8, -9, -13, -15 and -19 and operates in the H/I band. Mk 36, Mk 49, Mk 50 I haven't extensively tested this however and I am just going by radar band. For later systems (e.g SA-1x, I would assume the later seekers would be better equipped for them, but I'm not sure when which was introduced). EDIT 3: You can check the exact frequency that our radars are defined with, by checking the .lua definition for the unit, which can be found here - if you Ctrl+F for "Frequencies" it should take you to the appropriate line, note that the values appear to be in Hz. As an example, here's the .lua for the SNR-75V of the S-75V, on line 81 you can see the frequencies defined range from 4.91×109 - 5.09×109 Hz (i.e. 4910 - 5090 MHz or 4.91 - 5.09 GHz), which is indeed in the G band as it should be and matches this). See this table for a list of what frequencies correspond to what bands (you're looking for new nomenclature). Note that some units appear to have this undefined, the 9K35M3 Strela-10M3 [SA-13 Gopher] is one such example, some ships also don't have this defined (though some do).7 points
-
I see. Then the amount is likely on our backend, ill have a check :)7 points
-
I deleted the reply because I wanted to check something specific before re-posting it and subsequently got ill later in the evening. Nothing nefarious going on except busy developers and getting pulled in many directions. Apologies! Our privacy policy is linked directly from our site, as well as linked from the EULA in the game folder. As mentioned in the other thread, since there seems to be concern about errant http requests, we'll add a new safeguard for ensuring there is no connectivity whatsoever. There's absolutely no aggressive telemetry or malware delivery happening, at all. One of the google fonts was left in the manual which has since been removed (hence it was pulling it from Google) and as noted in the privacy policy, we only have a user counter otherwise. The font-fix should be available in the hotfix, apologies. As noted in the other thread though, our UI will never rely on any online features, so we'll add a fully offline checkbox to inhibit any HTTP requests to inhibit any and all connection requests. As a stop-gap it should work totally fine to just firewall HeatblurUI.exe off entirely. It actually shouldn't; this may be a bug. I will look into it as we want as little CPU overhead as possible since the aircraft itself is very complex. When any UI element is closed, it should be mostly sleeping, and thus use very little CPU resources. We do have to periodically ping some of the UI elements to keep the JS ticking; but it shouldn't incur that much CPU usage.7 points
-
@Victory205 I appreciate the time you took to explain your results, but I don't think it addresses the problem I and others are having: The issue is that the actual incremental change in pitch trim that occurs with each press of whatever joystick button we've assigned to it, is seemingly too big and thereby creates too much of a response, leading to a constant porpoising around level flight. My theory is that this is a joystick issue, not a user issue, because, for example, if I assign a key combo to pitch trim, and I tap that key as fast as I possibly can (i.e. for aa short amount of time as possible), I see that on the controls indicator, the pitch trim position changes a smaller amount than when I try to do the quickest tap of my joystick button. And even if they matched, it's nearly impossible to do as quick a tap of that joystick button as it is on the keyboard. It seems to me that the trim is acting like an 'auto-repeat' function based on how long the button is held down; therefore, ideally what I would like, and what others users have wanted across a variety of DCS modules, is a customizable trim increment value. If our joysticks aren't letting us set the amount of time that each press of a button is registered, then at least slowing down how much the trim changes per unit of time would seemingly solve the issue for everyone.7 points
-
Just starting to scratch the surface of the Phantom, but I can tell you for sure is more similar to the F-14 than the Hornet or the Viper, which makes sense being 10 years older than the Tomcat. Radar complexity is nowhere near that of the F-14 and all A-A stuff is simpler. It has a million switches on the cockpit but every button does one or two things. For me too this is easier than remembering in which one of the 20 MFD Menus is the thing I'm looking for. It's an amazing module, and, as any older jet, has a very distinctive "soul" I don't find in newer planes. I'd say go for it.7 points
-
This is correct behavior. The tank is not empty yet. Kindly see the Fuel chapter in our manual. Thank you. The tanks only transfer for a short period to fill up the infernal thanks, then they stop again and will start transferring later again when the internal tanks lost sind fuel again. Each time this happens, the lamp will go on, indicating that nothing is currently transferring. To confirm that the tanks are empty, the lamp has to stay on for around two minutes without interruption. As well as your fuel totalizer will drop below a certain threshold.6 points
-
150 seconds after it leaves the rail. The 150 seconds is seeker operation time. The missiles battery is not fired until you press the pickle button, that is what engages the 150 second timer. there is a bug right now where if you reload missiles or change seekers using the rearm dialog in game, the shrikes will not guide. They only function correctly at the moment if they are on the jet at mission start, loaded by the mission editor. This could be a major reason for why people are having a lot of trouble with them. a couple of other notes: the tone you hear from the shrikes is always from the left most selected shrike on the jet, this is correct. This is also the firing order, if you have multiple shrikes selected they always fire left to right off the jet. there is a small bug where the left outboard pylon fires the shrike as a rail launched missile and the other three fire it as a ejector launched missile. They should all be rail launched, so seeing one missile fly straight ahead while the other three all drop after launch should be fixed at some point (all four should fire straight ahead and not drop away) for the question about putting a location to calculate a loft, this is what WRCS AGM-45 does, but it is not correctly functioning right now. You may have some success with it you may not. When it is functioning correctly I will update the above with how it works. The Shrike can only pull 3G 's with its fins when it is guiding. It is not very maneuverable. You really need it to be on a ballistic trajectory to the target, and it cannot correct gross guidance errors very well at all.6 points
-
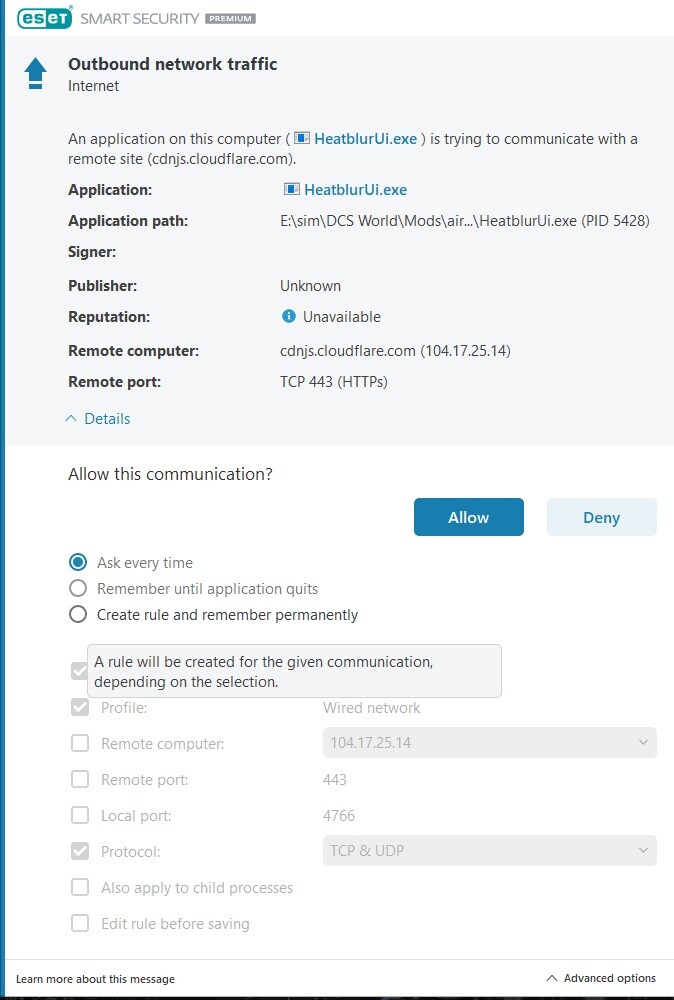
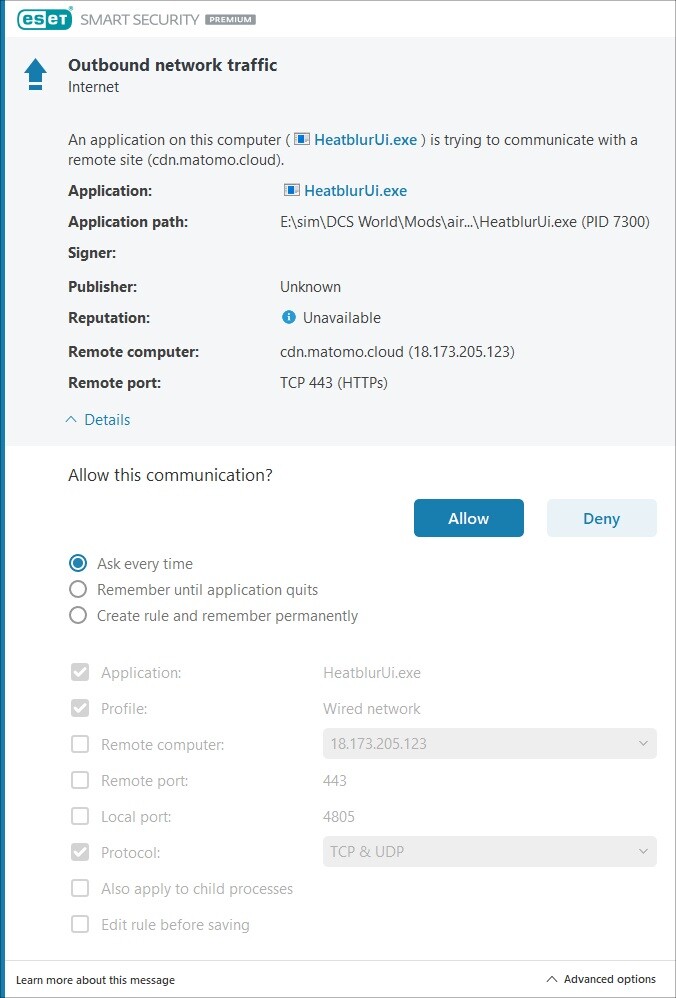
So, my worries has been confirmed, HeatblurUI.exe is making requests to cdnjs.cloud flare.com and cdn.mat omo.cloud, triggering my firewall allerts. (both domains and IP ranges are in my blocklist) Is it possible to add an option in special menu to disable those requests and add the privacy policy and the purpose of network requests in the ED shop product page? Thank you. Best regards. BJ
5 points
-
It can vary if the only tanks that need fuel are far from center. The fuller you are, the longer it takes to top off. But these effects are fairly minimal overall. The fuel system is complex and provides plenty of pitfalls and opportunities for misinterpretation. As mentioned, we will investigate :)5 points
-
I couldn't help myself5 points
-
Hello, To facilitate my work on updating my Static Templates, I edited a PDF document with images of the over 100 Massun92 assets that were incorporated onto the last DCS version. I wanted to share it, since it might be useful to other mission designers, can't attach directly to this post because of its size (7 MB), but here is a download link: Catalog of Massun92 Assets Pack within DCS.pdf Cheers! Eduardo5 points
-
Hit the road
5 points
-
Hello everyone, My name is Krzysztof Sobczak (some of you may know me as “Grover”), I am the Technical Director at Heatblur. Although I haven't been very involved in direct communication with our users because I have been focusing on working hard on our projects, today, I am excited to share some technical insights about our latest release. As some of you may read from me for the first time, I'll start with a short introduction: I am originally a physicist holding a PhD in particle physics. However, most of my professional life has been dedicated to developing flight simulations. I have had the privilege of working with companies like A2A Simulations and Metrea. In 2018, I joined Heatblur Simulations to work on the F-14 Tomcat. During this project, my areas of responsibility included the communication and navigation systems, the LANTIRN targeting pod, and JESTER LANTIRN. In 2021, I became the Technical Director to create a new core system - codename Anvil - a genuinely new-generation simulation platform. Having been involved in creating several flight simulation engines throughout my career, I have gained a deep understanding of the requirements for such engines and the shortcomings of existing solutions. This extensive experience has been invaluable in shaping the form of our new flight simulation platform, which we present today through the release of the Heatblur F-4E Phantom II. Our users may already be familiar with the innovative approach we applied in the F-4E Phantom II, particularly the concept of the components system. For those with programming experience, this might initially sound like a marketing trick, similar to object-oriented programming and using objects through composition in different contexts to build complex structures. However, there is much more depth to the system we created. Our approach goes beyond simple object composition and reuse. What sets our system apart from other solutions and programming techniques is its orientation around data flow. This focus is crucial for creating a system that is both reusable and granular enough to build entire aircraft and reuse components in other aircraft or systems. The challenge in making such a system lies in the uniqueness of many aircraft devices, so to achieve true reusability, we had to reach deep to a level where components can be generalized - the level of individual switches, relays, lamps, amplifiers, actuators, valves, and all other kinds of low-level components. By focusing on the components and the data flow between them through the connections, we managed to move all non-simulation elements outside the components and let Anvil handle them. The first core aspect of our F-4E Phantom II, driven by our engine, is its multi-crew capability. The component connection approach allows our developers to focus entirely on creating the simulation part of each component. At the same time, the system handles the communication between different components and distributes it over the network. From the developer's perspective, there is no difference between developing an aircraft simulated entirely on one computer and an aircraft whose simulation is spread across multiple computers. The second feature unlocked by the component system is multi-threading. By strictly separating components from each other and not allowing them to access other components directly, we ensure that the simulation part of each component can run concurrently. This approach means that developers do not have to worry about the complexities of multi-threaded development and can work as if the simulation of each component were entirely single-threaded. The connection system governs the rest — it de-conflicts multiple simulation threads seamlessly. It is important to note that while our system is designed to support multi-threading, this feature is not enabled in the version that users are receiving today to limit the risks of the adverse effects for the premiere of such a complex aircraft. However, multi-threading will be enabled in future updates, offering a significant boost in performance for everyone. Also, note that this is not the same as using the multi-threaded version of DCS - the multi-threading part of our component system adds another layer of parallelization, effectively offloading the aircraft simulation from the main DCS thread. The component system is oriented toward providing developers with the tools to create new components quickly and efficiently. With those tools, we can focus on recreating components' real-life properties and giving them an organic feel by adding imperfections, individual characteristics and failures that can occur as a natural result based on the treatment of the components. Later, we use those components as bricks to build the aircraft in a fully synthetic way, while Anvil makes each airframe unique and each flight a new adventure while giving virtual pilots an incentive to not mistreat the aircraft. Finally, we plan to use Anvil and the same library of base components in all our future products, retrofitting them to the already published products where applicable. Sharing the same code will ensure that all our future aircraft will be automatically updated with our latest achievements and changes introduced to the system while developing any new product. This means that from now on, our simulation can only get more profound and more realistic. After introducing key features of the component system, let's delve into some statistics about DCS F-4E Phantom II. The total count of components used in our simulation, as in the final build provided to Eagle Dynamics, is 6,389. We used 14,627 component connections. Out of these, 2,297 connections are synchronized in multi-crew. The total number of properties across all components is 34,964, with 25,032 of these properties synchronized in multi-crew. Many of these properties are randomized and depend on the wear and condition of the aircraft. Finally, the total count of all damaged states in the aircraft is 1,562. While this number is already high, we plan to implement many more new failures during the early access period. Some of you might be concerned about the costs of creating detailed products like our F-4E Phantom II, which could negatively impact the entire market. We never intended that, and we are confident this won't happen. First of all, our goal was to make the development of complex modules less expensive by improving the reusability of the code and offloading most of the low-level and repetitive development to Anvil, which will handle it automatically. Furthermore, we are part of the flight-sim community and want the study-level flight simulation to thrive. From the first days of this new platform, we shaped it in the form of SDK, which we want to offer our partners. This includes the entire library of components and JESTER. We believe that cooperation and fostering synergies is more creative and profitable than non-amicable competition. As you will be able to experience the F-4E Phantom II for DCS yourself, I hope you will enjoy every minute spent in our recreation of this magnificent aircraft. On behalf of the entire team, thank you for the support and excitement you express daily through all communication channels. Have fun!4 points
-
Hi, The animations for DCS Infantry driving me crazy but I still try to get better results ... So far I understood, DCS is not ARMA and will never be. Maybe we can touch it a bit... I still on it. So ... yeah ... Thats the news from me so far. Cheers TOM4 points
-
4 points
-
HMS Eagle was considered for an F4 conversion, she was the only other RN Carrier of that period that had the hull size and realistic cost potential for that work, but it never happened. In the end the RN was only ever going to get 1 x F4 Sqn so the need never arose really. HMS Ark Royal was converted extensively to take F4's in 1977 and whilst Eagle did trail F4's, they did land on and take off again using existing kit, but she would also have needed a huge refit to do the job properly. F4's were ordered for her air wing but once the decision was made to cancell the F4 refit those aircraft were passed on to the RAF's 43 Sqn, I believe. One or 2 came back over time to replace accidents and natural wastage !! (I have a really interesting story of how 1 x F4 came to be lost off HMS Ark Royal, the pilot was a close friend - for another time perhaps !) The other RN Carriers of that period were never serious contenders for an F4 refit. HMS Hermes would have to have been almost completely rebuilt from the hukll up to take F4's, that was never a viable option and she had been earmarked as the next Cdo Carrier anyway, a role she was well suited to. HMS Victorious was, I believe, considered but rejected for many reasons, I think she was just too small and too old. I served with HMS Eagle when she was a fixed wing Carrier as an NGGLO, and in HMS Hermes (845 Sqn) when she was a Cdo Carrier, the differences in deck size and internally, hangars, stowage etc, was considerable. When they were scrapped Eagle was actually in a much better condition that Ark Royal, so I was told. I dont believe the RN ever seriously considered any other US Fixed Wing Aircraft apart from the F4, the Wessex and Sea Kings were UK Westlands built versions of US Helo's of course. Thats it, as best I remember.4 points
-
Hi, thanks for the feedback. I posted in here shortly after this thread was made but wanted to confirm a detail on one of the items and subsequently got sick and didn't circle back. Our privacy policy is linked in the EULA in the game folder, this is the avenue we as module makers for those sorts of things, but I will touch on this subject to link it somewhere more prominently (e.g. the store page). It's also available directly on our website. I agree otherwise, we will add a offline checkbox which should inhibit any http requests for those who do not want any connectivity to happen at all. Note though, that while our UI elements will always be fully usable offline - if we e.g. add baseline functionality to use e.g. Olympus or anything else, it will not obviously not work as these elements will be dependent on connectivity.4 points
-
I've asked some info here: https://forum.dcs.world/topic/349202-heatbluruiexe-network-requests/ , they replied, but after a few minutes the reply was deleted. The situation is worse than expexcted, I forgot to clear the hosts, so didn't noticed that some connections were dropped, HeatblurUI.exe connects to: cdn.matomo.cloud - (ex Piwik) notorious for tracking, aggressive telemetry, and malware delivery. fonts.googleapis.com update.googleapis.com - The Evil™ , everybody knows. *.r.cloufront.net - Amazon, everybody knows. cdnjs.cloudflare.com - notorious for mass surveillance and denial of service. f4.heatblur.local - dunno. They made a great work with this plane but: -it was nowhere mentioned of this network requests. -that multiple processes of google's crapware are eating cpu cycles and memory. I must check if hbui is having memory leaks because of the firewall... The funny thing is that everybody screams for realism, but it's fine if we use a youtube browser while flying: Sorry, if I need to browse while flying I can use another device or another monitor or alt+tab, with a (privacy respecting) browser of choice and whithout overloading my PC. I hope that they don't bring this PUP into the F-14, or at least that they give us the choice to keep using the Good ol' Jesta. For every problem ther is a solution, for every solution there is a better solution.
4 points
-
SU-57 Felon-A Standalone progress.4 points
-
Well, I don't want more broken assets than necessary, so I'll probably release fixes for the SAMs and deactivate the non-working stuff until I have solutions for them. Cool! Thanks for the info! Not really. It's the TVC parameter in Modeldata that has changed in the missile API. We'll see when they take if further. At the moment it's only a single PAC-3 MSE in a Mk41 cell. It's probably physically possible to cram two of them in a cell, without changing the missile. The older CRI would probably fit four of them. Yep, they all need to be individually solved. I'm considering making cold war era assets in the near future. The majority of my SAMs are out of action with the latest DCS update.4 points
-
This should be bold face at the top of this post tbh. This more or less guarantees they will be bugged for anyone trying to use them in multiplayer4 points
-
It looks like the developers are standing their ground. It is a pity that reasonable arguments cannot outweigh the reluctance to correct the original mistake. These are expenses, and the project is already being sold. However, I bought the module in anticipation of DСS standards in aircraft control. If the DCS community continues to rely on beautiful videos from paid bloggers, commercialization will inexorably push real aviation enthusiasts out of the project, giving way to grateful buyers of impressive promos. However, this process is already underway. I hope the developers will listen to people who understand the problem and change their position.4 points
-
You Gotta Be Sh*ttin' Me4 points
-
I think we would have this kind of thread. After my first filght
3 points
-
Surviving FAM-1 in the Phantom. Congratulations on your purchase of the F-4E Phantom II. It is a sweet flying beast, with enormous depth and versatility. It’s easy to fly while being tactically challenging. The aircraft is versatile, and the era it dominated was interesting, a combination that produces hours upon hours of engaging fun. First, don’t be intimidated by the hulking beast. The surprising little secret is that it’s easy to fly. The Phantom is honest and uncomplicated procedurally, the engines are responsive and powerful, and the slats make it feel responsive, but also stable and precise. You point it where you want to go, push the throttles up and man, does it go! As you would expect, Heatblur has delved deep into accurate modeling of systems and aerodynamics, and the result is a nuanced, detailed simulation of the F-4E. You will discover small details as you explore the aircraft and systems, they’ve even simulated the influence of engine exhaust flow on the stabilator due to its anhedral. How cool is that? From broad testing experience and SME feedback, I recommend starting with a pitch curve of at least 10 for the F-4. The simulator is faithful to the real F4E, which is sensitive in pitch. Experiment and refine your axis tuning for your controller from there. I am currently using a non-FFB stick with a 4 inch extension and heavy spring tension, 12 works for me. Map your controls. You only need pitch, roll, rudders, brakes, gear, flaps, nose wheel steering, speed brakes, trim in all axis and drag chute for this hop. Keyboard and clicking will be fine for the rest. We won’t be killing MiGs just yet. This guide is meant to be a quick and dirty “FAM-1” guide to get you in the air and safely back to earth. We’ll also have some fun in between. I know you’re eager to give it a try, so skip startup and begin on the runway, ready to launch. Fly a clean jet today, or throw on a centerline drop tank for starters. The trim will already be set (understand that due to the way the bellows/trim system interacts, until airspeed increases, the stabilator will be positioned full leading edge down on the ground), engines running, check that the flaps are down, let’s go. Normal Takeoff and Climb. Apply full afterburner, position stick full aft when Jester calls 80 knots and hold it there. Nose-wheel steering until the rudder becomes effective ~70KIAS (the NWS button must be held during operation). If you drift and need nose-wheel steering to correct, then center the rudder pedals before re-engaging. With full aft stick, the aircraft will rotate on its own when it’s ready to fly, ease off back stick to hold it at 10-12º nose up pitch attitude. Our intrepid F-4 SME’s and and recommended this technique, it works beautifully. Gear and flaps up immediately to avoid overspeed. Both have limit speeds of 250 KIAS. Min flap retract is 180 KIAS, which is only a consideration during military power takeoffs. Jester will let you know when they’re up. Terminate burner at 300 KIAS. You’re in the air, easy peasy, nothing to it. Climb at 350 to intercept .9 Mach. Mil power climbs at 350 KIAS initially require just over 20º of pitch. In Max afterburner, it will climb into the mid twenties at .9 Mach at over 30º nose high. Beast mode. Setting 3000 pph per engine results in a cruise Mach between .84 at FL 250 and .90 at FL350. That’s a fuel burn of 100 pounds per minute. Fuel planning couldn’t be simpler. Mil power at FL350 tops out just below Mach, around .97 IMN. Ease the nose down and it will go supersonic without afterburner. There is a little Mach Tuck going through transonic. Overall, the pitch changes are mild, trim is sensitive. Be quick with your thumb. Operationally, the F-4E is a Mach 2 aircraft. In level flight, it’s fastest at 35,000, and can achieve the dash one charted speed of just over Mach 2. Unload in a dive, and if you sport an adequate moustache, you can hit 2.2 plus. You can have fun figuring out the profile for that for yourself. At sea level, a low drag configuration tops out at 1.12-1.15 IMN. Adding external stores will reduce max Mach proportionately. Maneuvering Flight ROLL AUG off for maneuvering. Always roll using coordinated rudder and aileron. The higher the AOA, feed in more rudder as ailerons are less effective. Rudder only rolls are smooth and predictable. Reducing AOA increases roll rate. Experiment at different AOA’s and speeds, it will come to you quickly. Best sustained turns with typical Air to Air load outs at medium combat altitudes (SL to 15,000) range from 520-480 KIAS. Even with light pitch forces, flying a consistent, sustained turn is relatively easy. Smooth corrections pay big dividends. Control bank angle primarily with your feet. I checked the sustained turn G capability today from SL to 15,000 MSL, and it’s on the money. Gross weight affects performance of course, but if you’re doing your part, you’ll be able to hold 7.0 G on the deck, and 5.1 G while turning level at 15,000 MSL. I’m quite impressed with how stable the Phantom is at high G loads. You can already sense that the F-4E needs and loves airspeed. Use a 500 KIAS entry speed for a mil power loop, 450 with burner. A 4-5G pull up to 19.2 units will result in 200-230 knots or so over the top. It takes a lot of intentional baffoonery at very low speeds to depart controlled flight, which commonly shows up as a nose slice opposite to the direction of aileron input. The recovery controls are neutralize ailerons and rudder, unload with stick well forward (5 degrees AOA is a good target), and pull the throttles back to idle power. If the engines compressor stall, no big deal, go to idle, they recover quickly. Continue to hold up to full forward stick and let the aircraft do what it wants to do during post stall gyrations. As nose falls below horizon, and speed increases to 200 knots, you are flying again, so it’s safe to carefully roll with rudder and aileron to wings level, then pull up in light buffet, approximately 17 units, don’t exceed 19.2 units in the pullout. Spin recovery controls are rudder opposite the yaw/turn needle and lateral stick into (the primary recovery control is aileron), but perhaps the biggest shock having heard all of the lore, it is difficult to get the slatted F-4E to spin, even intentionally. That said, if the aircraft doesn’t recover, pull the drag chute. The aircraft will pitch nose down and accelerate. Either jettison the chute or let it fail when airspeed exceeds ~250knots. If you see a nose slice, it’s probably the ailerons causing it. Center the stick, reduce the angle of attack. The AJB-7 attitude indicator is so well designed that it can be used to fly precise aerobatic maneuvers, including rolling out on a specific heading, without looking outside the cockpit. The indicator is surrounded by the primary flight instruments, so in addition to the heading marks on the AJB-7 itself, you can see airspeed, AOA, altitude and the VSI in your peripheral vision, without shifting your scan. It’s all right there. Try this. Referencing the attitude indicator, pull up wings level and peg the nose exactly in the middle of the black dot that depicts 90º up, then pull the throttles to idle and do a lovely tail slide. If you get it right, the aircraft will back down, and full aft stick will make it flop forward, full forward stick will make it flop on to its back. Hold controls neutral, and it will pendulum past vertical at the bottom, where inertial dominates aerodynamics, just as a real fighter does. The AJB-7 clearly indicates where the closest horizon is to roll and pull out with minimal altitude loss. You can use it to pull out of a hairy maneuver on a specific heading, bugging out directly at home plate, where you can change out your underwear. Landing Max landing weight is 46,000 pounds. We aren’t too concerned with limitations for our hop today, but you don’t want to get into bad habits either. That’s about 12,000lbs of fuel for our configuration today, shouldn’t be a problem. At max landing weight, a stable on-speed landing AOA of 19.2 works out to 168 KIAS. If we were down to 3000 lbs of fuel using today’s configuration, on-speed would be 151 KIAS. Overhead breaks at 350-400 KIAS work well. 4000 pph will result in 400 KIAS on the run in. In this speed range, idle power in the break is fine, speed brakes are not necessary. If you do use the boards during a faster break entry, they should be manually retracted on downwind. If you are struggling to hold altitude when dirty, then you forgot to retract the speed brakes. Seat full up for landing. It’s difficult to see over the nose, so you may need to use RCTL+RSHFT+8 to raise cockpit camera. Extend gear and flaps at 250 KIAS, get the power back up as the aircraft decelerates towards 180 knots. That’s minimum speed on downwind, but slow to the “on-speed” AOA of 19.2 units (the big white square) before or during the first part of the final turn. Jester will talk you through the simple Landing Checklist. For reference, when level downwind, pitch will be 10-11º, and ballpark fuel flow with be ~4000 pph per engine. The aural tone and indexers give plenty of feedback. Gear and flap extension both cause a very mild pitch down. Flaps extend when decelerating through around 210 KIAS. Flaps will retract in the air if over-sped. Like most fighters, you’ll need to add power around the approach turn to control rate of descent. It doesn’t take much. Perform all rolling in the pattern with coordinated rudder and aileron. Trim and pitch are sensitive in the landing configuration, faithful to the aircraft, so smooth inputs are required. Fly with your fingertips. Due to the -5.25 degree thrust line of the J79 engines, adding power causes the nose to pitch down, reducing it causes a pitch up. It’s exactly opposite of the F-14. When you push with your left hand, you will need a slight pull with your right and vice versa. It’s also a happy little airplane during approach, with the AOA tone beeping and chirping. In fact, it’s quite easy to get on the runway in one piece. All of that cheerful noise should be a clue that the Phantom is flown while referencing AOA in the landing pattern. If you are struggling, try flying a little fast, with the AOA needle at the bottom of the white, “on-speed” index mark, around 17-18 units. We aren’t landing on the ship, so a little fast is fine as you get familiar, you have plenty of runway to work with. Use the “bug on the windshield” for glide path reference. Just like landing a Cessna. If you are addicted, you’ll quickly wean yourself off of HUDs. If you get behind the power curve, above 19.2 units or more, understand that excessive AOA causes enormous drag that if unchecked, will dramatically increase descent rate. To recover, forward stick to reduce AOA immediately is critical, while adding lots of power. You need both, don’t try to power out, reduce AOA with pitch. Danger of stall buffet and nose slice lurks above 25 units. In the flare, you may need to look to the left or right through the windshield side panel to see the runway, like Lindbergh did flying the Spirit of St Louis. It’s where you look when landing tail draggers or even fat nosed single engined Cessnas. Some instructors call it “The Lindbergh Reference”. I find that carrying power into the flare makes for a smoother landing. Arrest the rate of descent before you ease the power and let it settle. If you are fast, then pulling more power in the flare is fine. When you try a carrier landing, and we all know that you will, keep in mind that you will need a significantly wider abeam distance. The F-4E lacks the BLC flaps of the Navy versions, so you’ll be flying a much faster approach turn with a wider turn radius. The LSO’s will be nervously eyeing the net. Good luck. Single engine approaches are simple. Only real change is you a little faster, at 17 units, the yaw due to asymmetric thrust is easily controlled with rudder, even in burner. Fly a straight in approach using gentle bank angles and you’ll be fine. It helps to get rid of most of your fuel before landing with an engine that is “uninterested in further toil”. The F-4E also has a nifty flight director on it’s remarkable AJB-7 attitude indicator that makes ILS approaches a piece of cake. ILS freq is set on the pilot’s left console. The controls for what drives the needles are on the lower right side of the instrument panel. Give it a whirl, flight directors are amazing. After touchdown, lower the nose, pop the chute, hold the stick aft, and enjoy Jester’s compliments on your landing as you roll out. I bet that you land it on the first try. When clear of the runway, there is nothing like opening the canopies and enjoying the sound of two J-79’s while enjoying some fresh Phantom Air. Soak up the satisfaction of a flight well-flown as you taxi back to the ramp. You just experienced what it is like to fly an iconic fighter that continues to menace the skies even today. Damn, that was fun. Maybe that's why Jester loves to say, “We have the best job in the world.”3 points
-
With no fuel, engine damgage etc. your Hydraulics will go to zero in an instant. Apparently the F4 we have really didnt have any emergency pumps to avoid that (manual states later models had it) but the bug for me is, that its instant. With no loads on the system, standing on the ground you should not see an instant drop in pressure. Usually you can bleed it of by moving the stick a bit. Manual states windmilling will provide Hyd power in flight, but again. Its not working, direct loss of control is the result.3 points
-
Sorry if I'm misunderstanding the problem you seem to be having, but I just added the sandbag helipad (M92 Sandbag 11) in one of my missions and the rearm and refuel functionality works like a charm here. I did place it over the invisible helipad (just like @Rudel_chw suggested), my helo spawns on top of it and I can still rearm/refuel. (I actually combined a few of the sandbag helipads, as one isn't big enough for the Apache). (Sorry for the poor pic quality, I quickly took a picture of my screen)
3 points
-
Only when you are cpu bottlenecked, which you are not with the 5900x in most scenarios. I would put it this way - if I was to build a DCS (or gaming) exclusive PC and had to choose - I would probably pick the 5800x3d. If I already owned a 5900x and had to pay extra to switch - I won’t.3 points
-
Thanks so much for making the video. I was thinking of making something similar. You've illustrated the dead stick on the ground and in the air at slow speed and its limp noodle behavior -- and how absurd it is -- quite well. There is zero reason why we shouldn't have full control over stick position in that situation, and it illustrates the major conceit and problem with their model in a way that's a little more obvious to most people. The pilot's hand is on the grip! We should be able to position it anywhere within its range of travel and hold it there in the complete absence of load forces, save for the bobweight. Maybe Heatblur thinks the average simmer is incapable of lifting 3-5 pounds? After trying to fly it quite a bunch more and only becoming more and more frustrated, I feel the emphasis really needs to be on the lack of direct correlation between the user's input and in-game stab position, how fundamental this relationship is to flying non-FBW aircraft, especially with a spring-loaded set up, and how it has been completely broken in this implementation. It is not true to life in any sense. For instance, it's almost impossible to fly the cross: If you pull, but then unload the stick before trying to roll, you'll just experience a bunch of slop and oscillation in pitch. It's quite violent without pitch stab augmentation. It's impossible to achieve any precision. Forget the visual representation of the stick -- go to external camera and watch the stab dance around uncontrollably even though you've locked your grip tight. It's such a large, fundamental error in modeling that the rest of the module is completely overshadowed. My Phantom is grounded as well... Gotta talk to the crew chief, something is wrong with the rigging!3 points
-
R60 is one of the weekest missiles in game, so that is not very surprising. depends also on the angle, and where you hit. Currently there are over 1500 possible failures in the F4.3 points
-
Daily MiG-29 MiG-29 OVT (6th MiG-29M prototype)
3 points
-
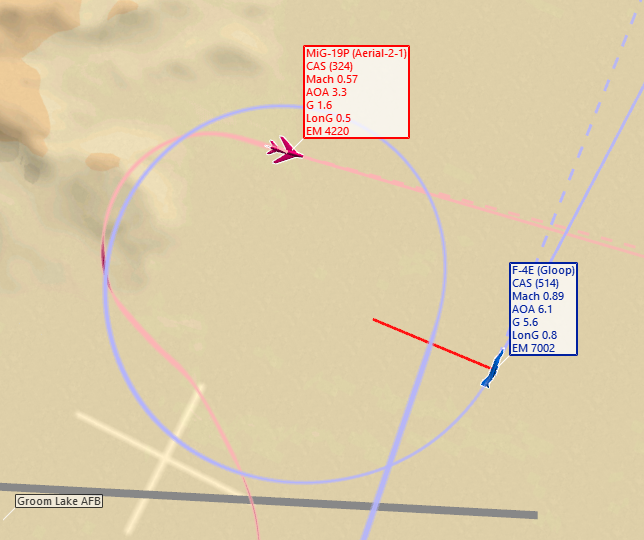
Ok here goes: This is by no means perfect and its vs AI so take it for what its worth. Some parts I think are decent demonstrations of what sort of things one might try in the F-4 to get an advantage against a tigher turning or very aggressive oponnent. Obviously some parts of it will not work against enemies with All aspect missiles or in a not 1v1 scenario. Feel free to critique or point out errors as you all see them. The first turn is a decent example of a spiral climb. Bleeding off speed in the first part of that turn was probably a mistake but it worked out in the end. I can quickly tell hes bled alot of speed so I start climbing until he cant keep up, then go steeper nose up and reverse with the rudder. The AI tries to shoot its RQ missiles at me but its high angle off and they probably wouldnt make the turn unless he had fired them with alot more lead. Coming down like I said I was managing AoA to try and get into an offensive position while also getting at least some amount of speed back as well. The snapshot at 2:30 or so showed bullets pass between the wingtip and fuselage... Close but no cigar. Flat scissors are clearly the MiGs playground and the F-4 can only stay there so long so its time to do something else. Getting out was the right call but the climb afterwards is a good example of what not to do as an energy fighter. Impatiently it was started too early and without enough energy margin. A player or less stupid AI probably would have shot me at the top at 3:20. Failing to make the kill as the energy fighter can be quite dangerous. The better move is IMO what I did after that at about 3:30. Dive towards the bandits extended 6 oclock and pick up speed. Then start a sustained turn back for a neutral merge. Since the F-4 accellerates better than the MiG you might even come back with an advantage if you time the turn back right. I stay horizontal in a sustained turn again here, and the MiG goes nose to nose. Since he gained a huge amount of angles in that one turn he must either be slower than me or turning very hard and getting very slow by the time weve come around. Now its time to defend the snapshot and start going vertical again. Given he had no more missiles I might have tried a pure vertical zoom here as well. After this zoom I end up with what is probably a pretty good RQ missile shot position. In this case Im trying guns only so I dont take it. The result of those scissors are another example of how dangerous it can be to fail to make the kill. It might have been wiser at 5:20 or so to turn left away from the MiG and accellerate and turn back again. Or even just starting the zoom earlier. There is definitely a shooting opportunity on the way up into that climb at 5:30. Here it probably would have been better to get steeper in the zoom or even just go straight vertical. I also turn left in the spiral whereas it probably would have worked better continuing to the right. I get fairly slow without having the nose up high enough as well. This one didnt work out nearly as nicely as the others even though I had quite an energy margin at some points there. Anyway, very far from perfect, but perhaps illustrative in a few ways. Edit: Btw this was flown with full internal fuel and 4 sidewinders. By the end I had burned 6000 lbs of gas.
3 points
-
Sounds more like the old issue of a new player not really knowing how to handle it. There have been plenty such cases in the past, all while the majority of those who fly it have no issues taking off and landing. And since you provide no information about whats going wrong or where your issue is, all I can say is either get us a track so we can help you or practice more...3 points
-
Same goes for both of you. Fly a mission you want to fly, track is recorded automatically, if it's too big to post here, upload it to cloud and post a link. Let ED worry about its size or if it's broken. If ED comes back saying it's too big, broken, whatever, you can then tell them that it is squarely on them and it is not your job to create specific missions to recreate the issue. So, yeah, amount of work some people spend here to complain over and over is a few magnitudes over amount required to post a track you already have. Your only work here would be to actually upload that track, it's not like someone is asking you to build up a damn Great wall of China. I agree it should not be up to us to do this, but it's ED's sandbox and we can either play by their rules or GTFO.3 points
-
TM Warthog on a 20cm extension, no other mods or software. Running relatively low framerates at 30s~40s in VR. The Dash 1, page 6-7 (handling qualities; landing config), indeed says: However in DCS I do not experience this. I can change the pitch trim 2~3 degrees and I'm still holding my physical stick in my gut (hyperbole, but I'm literally unable to trim pitch to neutral or near-neutral on approach). For me, the trim is too coarse/over-responsive in regular flight regimes, and mostly useless when configured for landing.3 points
-
Tried that and it didn't work - it just disabled the trim altogether. Seems that value isn't modable the way it is in other DCS modules. HOWEVER - very interesting results of another test I just tried: I assigned the pitch trim to not only my joystick trim hat, but also to my VKB STECS throttle's pinky rotary knob, which has distinct 'notched' rotation as opposed to being a smooth rotary analog axis. For each 'click' of this rotary up or down, I see the pitch trim change by maybe half, at most, of how much it usually changes by using my stick's trim hat! It seems this method avoids the 'auto-repeat' function because it's (presumably) just sending a single 'press' command each time I click it up or down and there's no way for it to register the button being seen as held down. Trimming out the airplane is now very easy! Might be worth trying if others have similar rotaries.3 points
-
3 points
-
OK gents, I just trimmed out a 46,000 lb F-4E in the landing config with 4SP aboard at 800 MSL on the Caucuses Map. Sat there level for over four minutes using gentle rudder inputs to keep the wings level. The parameters were 168 KIAS, 87% rpm, 4700pph per engine fuel flow at exactly 19.2 units AOA with the aural tone constant. This is the way the F-4E flew, with sensitive pitch and trim. All of this was tested with detailed scrutiny, discussed at length, retested, ad nauseum. In due course, the SME's who flew the jet described it as correct. The overall handling feel reminds me a lot of the TA-4J, which is a quite a bit more sensitive in pitch and especially roll. Use very quick trim inputs, your right arm needs to be supported on your thigh or on the arm of a chair. It's obviously a finger tip aircraft, as was the real jet. Don't forget that the thrust line causes a pitch down as power is applied, pitch up as power is reduced. In the landing config, there is almost never a reason to input more than one quick click of pitch trim at a time. When you are stabilized on approach, you can also make very fine power adjustments using only one throttle. I find the thing quite stable over all, easily holding ±50 feet at max mach. It's more honest and easier to control than some of the DCS "warbirds" in pitch. It's very easy to maneuver under G as well. You simply need to stay after it and gain experience. Make friends with it, practice, and press on. The cool aspect was that when the aircraft flew over a ridge with a couple hundred feet, it picked up a 300 fpm rate of climb, then phugoided back to it's original state in one cycle after clearing the ridge. Perhaps it was DCS/HB modeling ground effect?3 points
-
"Deadly Encounter" remake! If you haven't seen the flying scenes in this movie you're missing out. Full movie is available on YouTube.
3 points
-
Will be added, yes.3 points
-
It's not that I don't think I can get used to it. It's that I understand but disagree with the entire premise of how you've chosen to model the stick. Fundamental to flying in a non-FBW aircraft is the relationship of stick position to the deflection of control surfaces. The real F-4, despite the control feel mechanisms, still maintains the relationship of stab position to stick position regardless of how the control forces may be being modulated by the system. Control feel with non-FFB hardware is an old problem in sims that's been tackled many different ways. The reason I fly DCS and not IL-2 is because DCS generally retains the key relationship between the virtual stick and your control peripheral, and therefore control surface deflection itself, foregoing the conceit of attempting to emulate feel in software. This module is now breaking that tradition, and despite the beauty of the entire package it really is a deal breaker for me. It's not just the stick moving, and so it's not just a visual problem: The stab is moving along with it. As such, the relationship between my stick at home and the stab in the game is broken. Feel is irrelevant to this critical point, and it can and should only be added as a layer on top of this with proper FFB support. By abstracting this function, you have not-so-arbitrarily broken the critical link between the pilot and the sim. I say "not-so-arbitrarily" because there is a reasoning behind you doing this, and it is based on actual simulated control forces. But again, the fact that you've modeled the bobweight and bellows system is not at issue, despite the fact that you seem to be implying that's what some are complaining about or needing help to understand. I believe it is also invalid to say that changing the stick simulation would somehow invalidate all the other good work you've done: One need only look at any other non-FBW module in the sim. All of those aircraft in real life were flown by pilots subjected to the same types of control forces and pressures as the F-4, and often have their own distinct systems just as the F-4 with its bobweights and bellows, and yet each one of them has been fully realized in the sim without having this particular issue. You can have all the same control forces and reactions included in your model -- just as the warbirds and other non-FBW aircraft do -- but without decoupling the stick as you've done.3 points
-
3 points
-
There is no advice for combating UFO planes with the F-4E. The AI flight models of some DCS modules are unsophisticated and completely unrealistic. Measured by their real technical parameters (power- and wing loading, G limits, etc.), these DCS modules can rise into the sky like rockets, and they hardly lose any energy during high G-maneuvers. They can fly abrupt turns without being damaged. In reality they would lose their wings. The UFO behavior of modules such as the Mig-21Bis, Mig-19, F-5E must be corrected as soon as possible. The best solution to address this problem is the early introduction of the General Flight Model Program (GFM) announced by DCS. This announcement was made a long time ago. Little has happened so far apart from a few corrections in the WWII section. This problem remains unsolved for all other modules. https://www.digitalcombatsimulator.com/en/news/newsletters/a134f231fe8269e1c78dd6d0dd8c3c9d/3 points




















.jpg.70a2a26e63b0e65f380d5e6afd059c5f.jpg)






-
Recently Browsing 0 members
- No registered users viewing this page.