Leaderboard


Popular Content
Showing content with the highest reputation on 10/09/23 in all areas
-
This is now fixed internally. The fix will be part of DCS 2.9.5 points
-
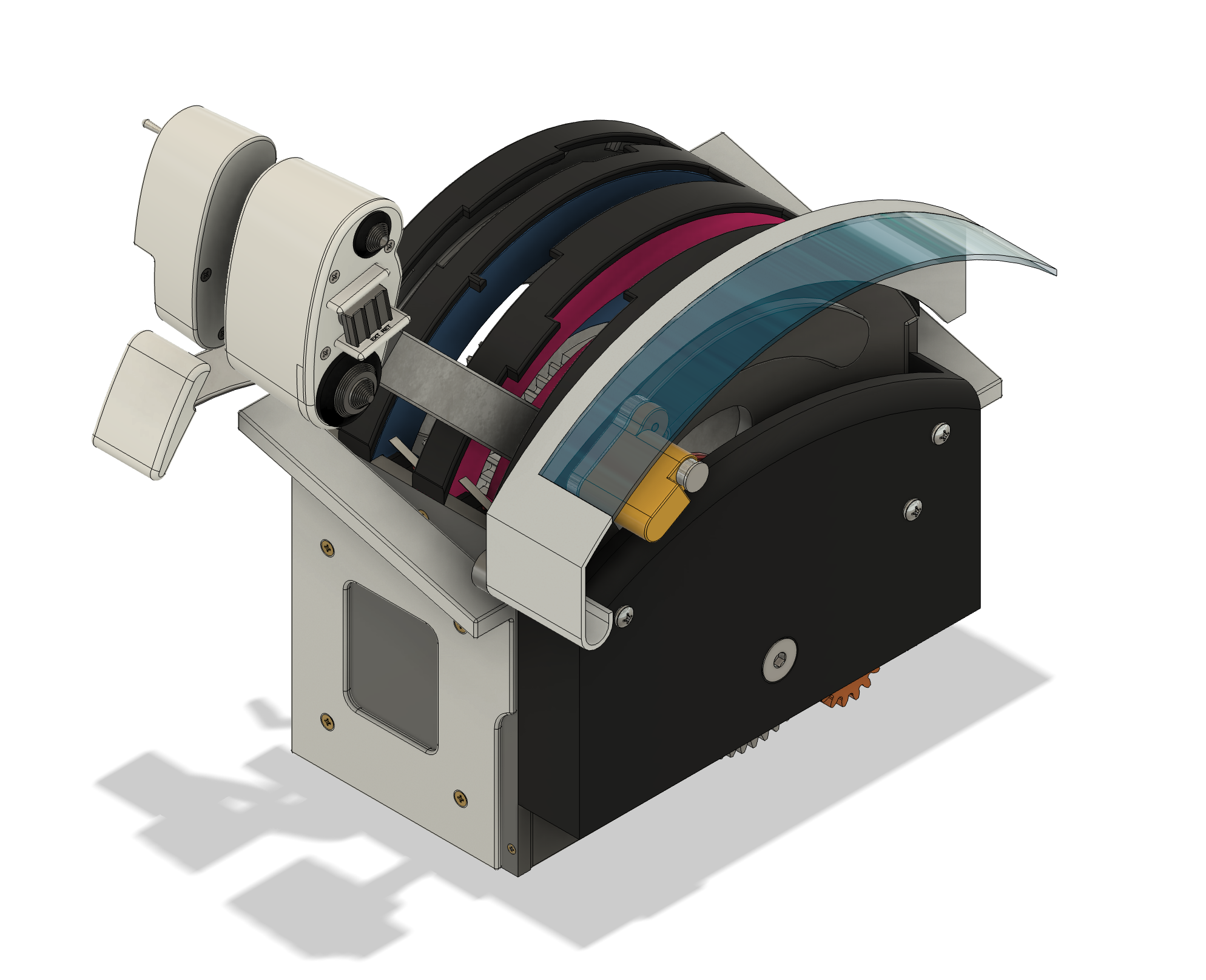
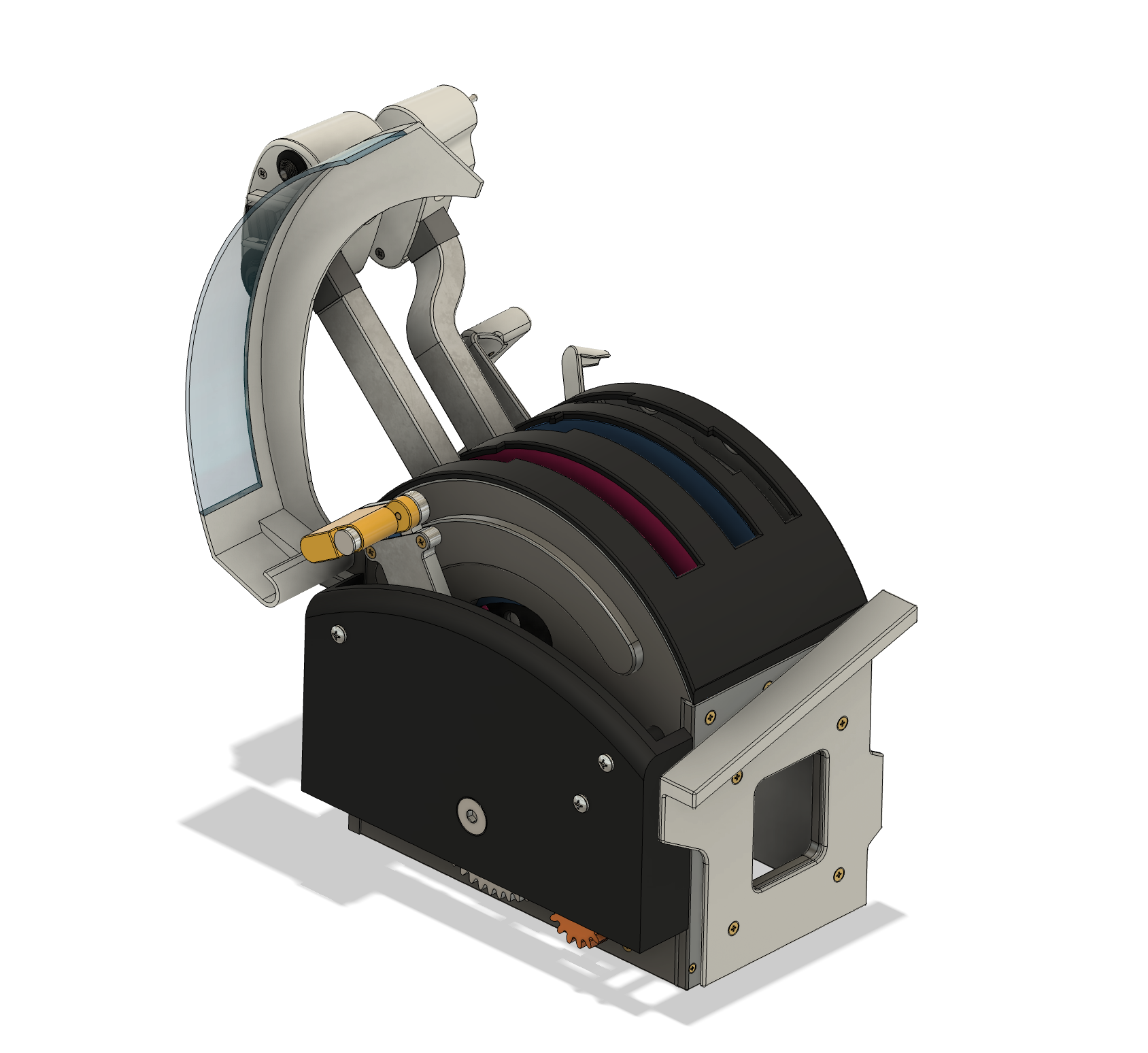
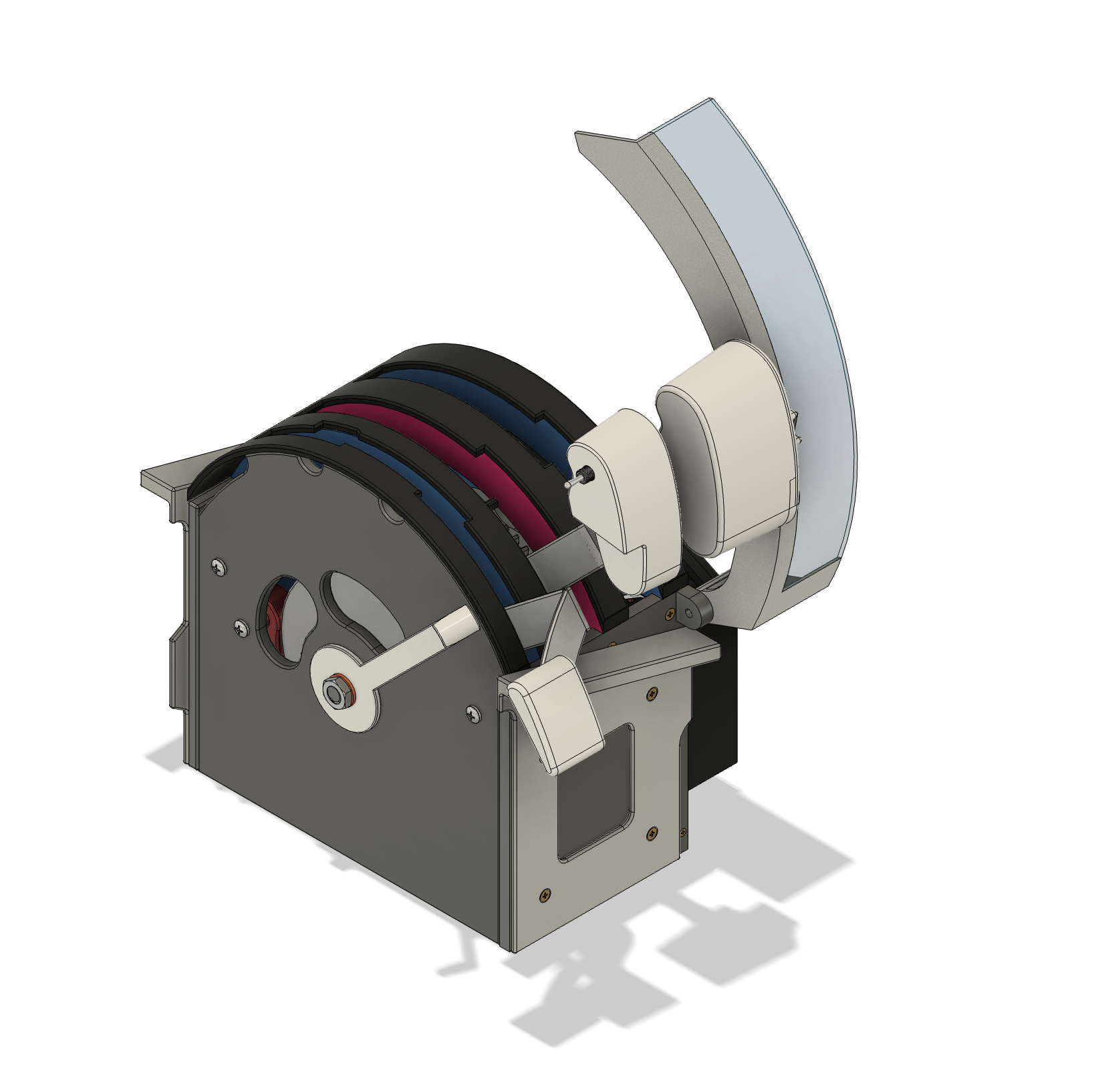
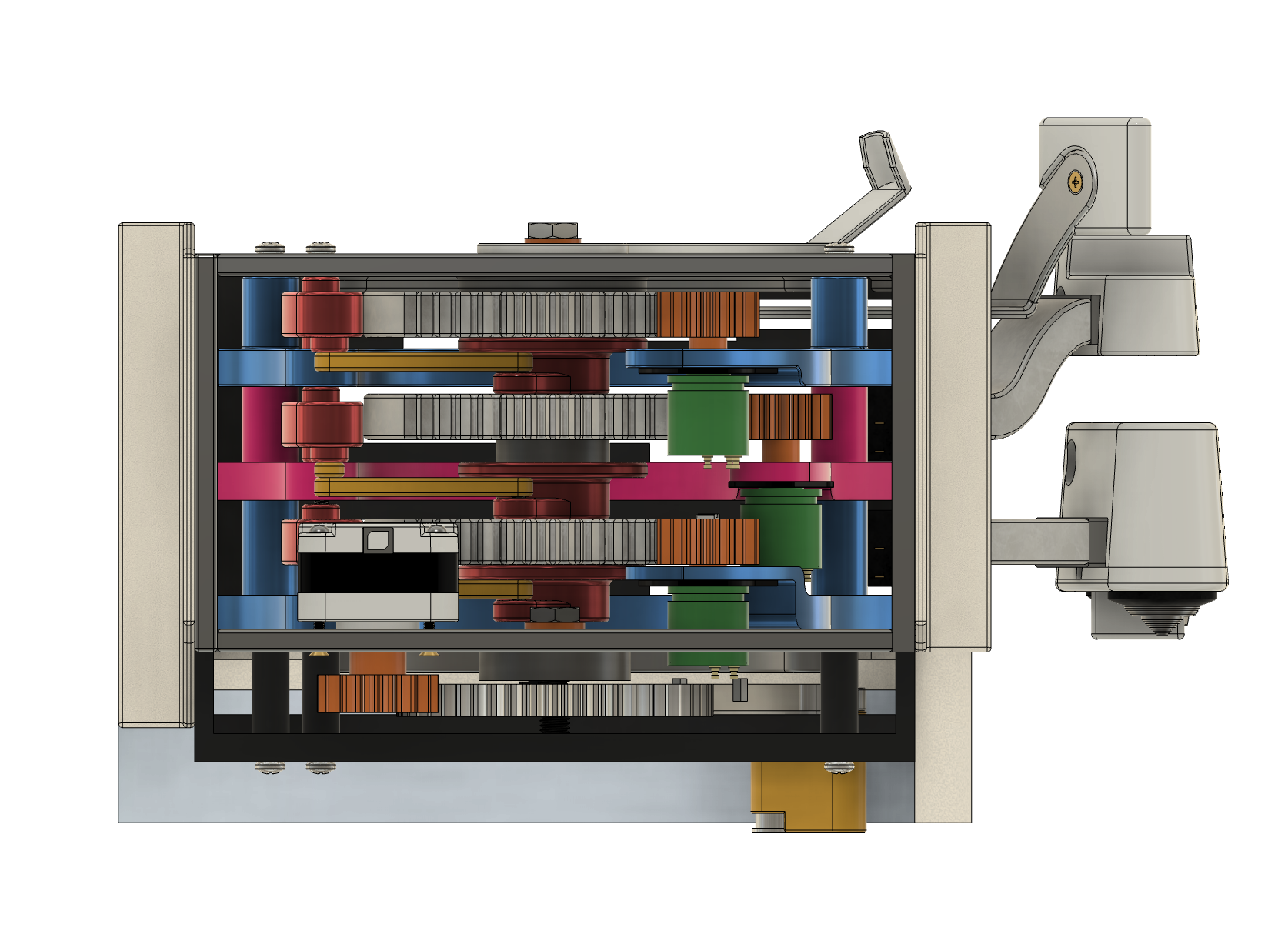
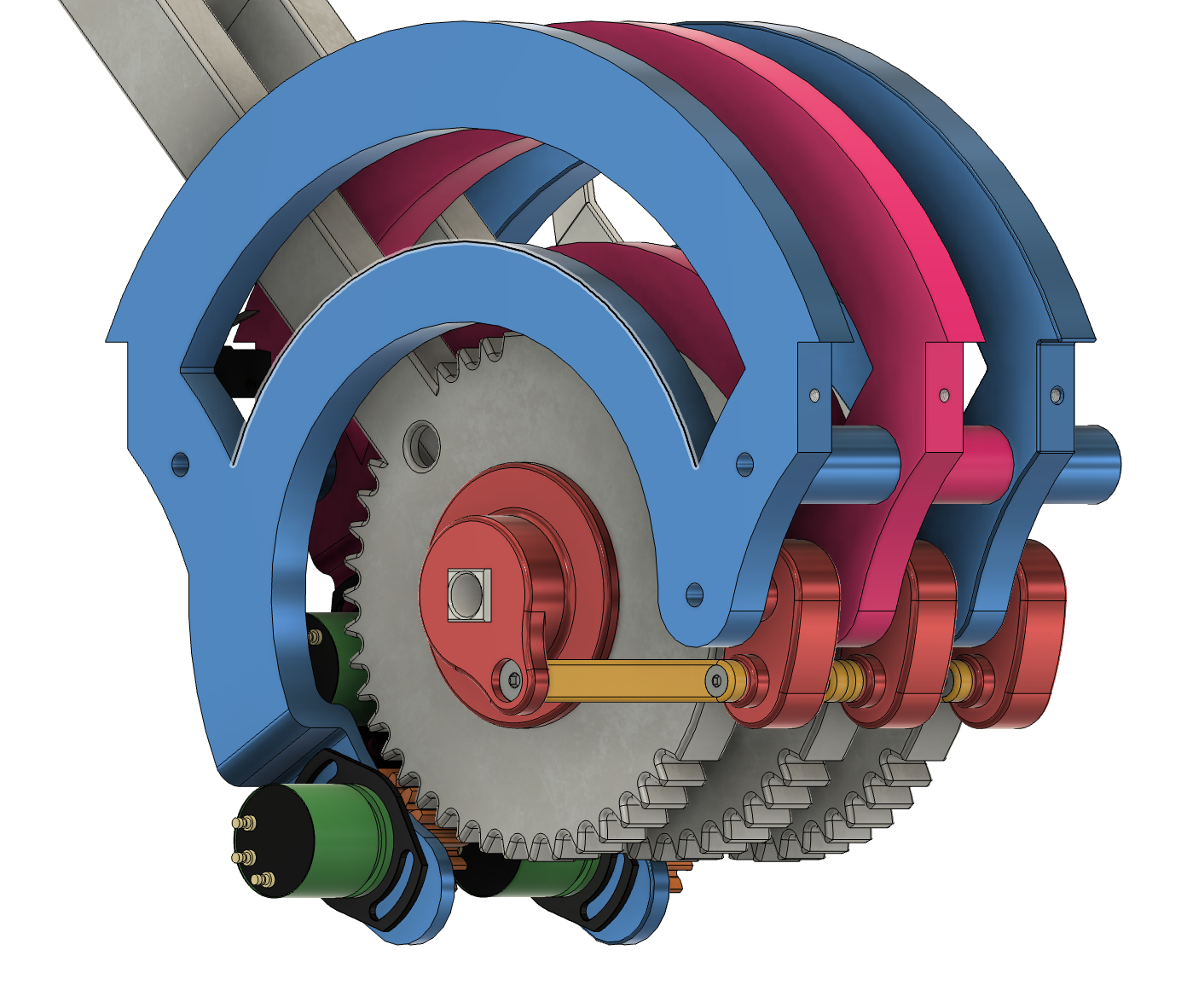
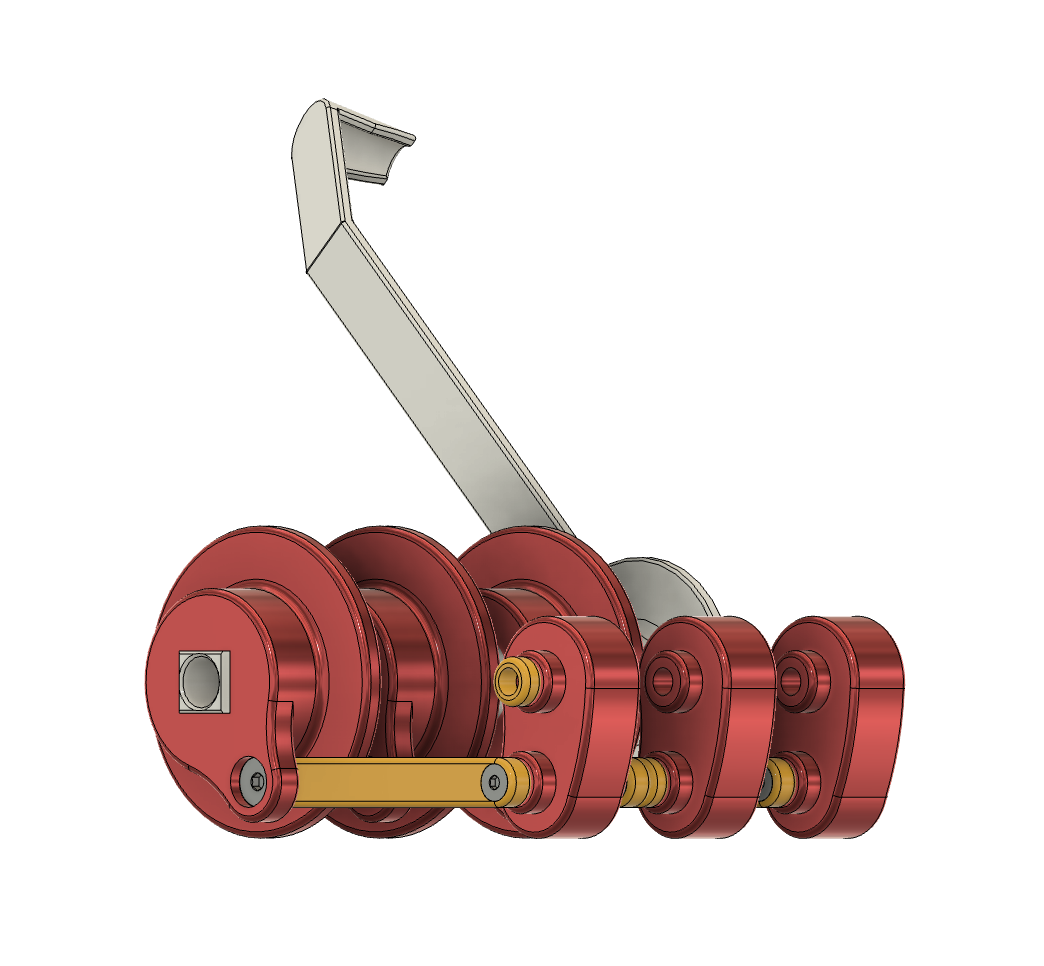
Gentlemen, I am seriously jealous of the your pit Mumbles! That beast is absolutely beautiful. I'm trying to talk my wife into letting me do that but she wants children... I don't think she understands... this is my baby! This forum keeps me motivated and I really love seeing the photos of everyone's work. Anyways. I know from the photos that it doesn’t look like much has changed but pretty much everything is different. I made it to v25 before I realized a mistake that pushed me back to v3. Derp. Anyways, I’ve hit roughly a 95% solution in modeling. At some point I’ll model the “REMOVE COVER FOR SWITCH ACCESS” cover, throttle position covers, flaps and friction position cover, but not any time soon. This has been a lot of work. I’m leaning towards not modeling the lettering on any of the handles (ie flaps and throttles) because I’d like to laser engrave those instead of 3d printing them. I modeled brackets for the Dzus rail because I want to build a sim pit and sliding this bad boy in there would be the crown jewel. That means I’ll be modeling the throttle arms with an angle offset at some point in the future. That shouldn’t be too much work (haha). Some changes have been made. The friction brake… it actually works.. finally.. The last photo is a little shot of the friction brake and all its bits and pieces. However, due to the friction brake being a dick, and the circumference of its parts being too large.. the flaps, right throttle and left throttle bearings have been changed from 603 2RS ball bearings to 6203. The 6203 has a larger center hole, which accommodates the size of the friction brake assembly. The emergency wing sweep bearing is still a 603 2RS. The emergency wing sweep arm articulates up and down and locks into place and the push button actually acts as a release! It has a tiny litlte spring inside and fiddly bits that are probably going to drive me bonkers during the assembly but at least it looks nice! That ended up being a lot of work but a very cool exercise in how parts move in relation to one another. I moved the Arduino. It can fit inside the throttle quadrant but because I’m in the process of sourcing/modeling/building rudder pedals and a stick, I’m considering having a stand alone box and wiring everything there with mini din connectors from each of the 3 devices so I can do a quick disconnect. I’d be happy to model mounts and holes inside the box if anyone needs. The stepper motor that drives the emergency wing sweep has been upgraded to a Nema 17. All told there are roughly 60 screws, 10+ buttons and switches of various forms, 4 hall effect sensors, washers, nuts and well over 200 parts. I think I’m going to take a few weeks off from this before I start 3d printing. This has been a lot of fun to do and I’m excited to bring this baby to life! Let me know if you guys have any questions!
 4 points
4 points -
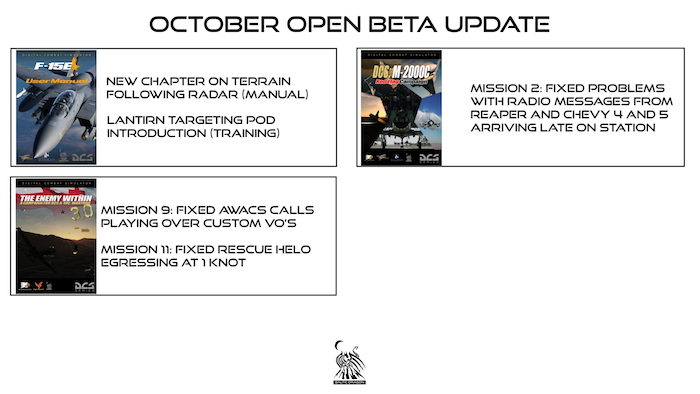
So I thought I'd start making regular updates on what is coming, starting from October.. you'll see the most recent one in the initial post.
4 points
-
коллега!) это лично Ваше восприятие) если бы мы всё знали сразу... то зачем бы все обновления в ПО были?)) к изменениям в жизни (моё мнение) лучше относится спокойно, какими бы они ни были. От Вашего "кипения" , от благородного чувства "правоты" (как Вам кажется), ничего не изменится в лучшую сторону. ФМ ЛА весьма сложная штука. Сколько ни делай все равно что-то да не так. Но если что-то у Вас "подгорает" - подождите до релиза.4 points
-
Hi @currenthill, loving all the effort you're putting into your work. Any chance we'll get to see some Chinese Infantry assets or any version of the ZBL-08 IFV in the future?4 points
-
@Rhrich Don’t be mistaken. While I like to poke holes in the self-contradictory nature of the „realism“-fetish that some display, I am also a big believer in the artistic freedom of the creators and a more humble approach of making wishes instead of demands…. also I personally don’t have or see a problem with the Tomcat workplace environment. (I wouldn’t mind a cleaner version also, I just figure it not important to be honest)3 points
-
@currenthill Привет,Are you working on Tochka-U?What is the progress?3 points
-
у нас под сомнением ВСЁ!)))3 points
-
Most of the text for the dash has been created, the AoA gauge has also been completed. I am getting close to a 1.0 release.3 points
-
Refer to NOTE 4. There are more datalink features coming, but they are not fully implemented yet. Wags was just showing the datalink features that are currently working as intended for the initial release of the AH-64D datalink. In other words, stay tuned.
3 points
-
Forget about MP, what about AI, AI already have various omnipotent/omniscient powers that give it advantages. Now we're gonna have to "argue" with the radar while AI always have perfect lock and control.3 points
-
WIP Fuel tank bumped 95% done working well
2 points
-
Guys, if you really want to enjoy the F-4B/C mod, I can recommend the following multi-player servers: 1. StreakEagles Vietnam (VSN) Servers. Great missions, really cool made and perfect for the timeframe. 2. BurningSkies Foothold/CommandCentre/Pretense Servers. Lots of mods availabel (F-4B, F-4C, F-104C/G/S/S_AG and a lot more). No introduction into Foothold or Pretense needed. Awesome missions even made better by Chazz with some cool add-on functions. BUT you will need to pick your fights, or you will go up against a Su-33...hhhmmm...challenging 3. Hooligan's ColdWar Server. Nice, fitting cold-war scenario to get some good AtoG or AtoA missions done. Definitely deserves a visit. 4. TaktLwG66 Pretense ColdWar: Yes, a ColdWar mission by Mr.Foothold himself, with added F-4B/C and F-104G and all that on stable (for everybody who does not like to see that nasty little DCS-crash window all to often) On none of the above servers will you get punished for making mistakes while learning the F-4 or F-104. But they are really a lot of fun and you can fly the Phantom in AtoG, SEAD, CAP or CAS missions...you like it, you can have it. Cheers and enjoy the phantom... P.S.: Little "micro" update on the way regarding the radar-set...just very tiny but may be a bit more immersive than the one we have right now...2 points
-
I'm working on a skin pack (i'm aiming for 5 different serial numbers, nothing accurate) for the 159th Fighter Wing, 122nd Fighter Squadron, Louisiana Air National Guard. I took some liberties with the coloring and markings. Let me know if you have any suggestions. I am finally moved in, unpacked and my wife didn't kill me in the process
2 points
-
Hi. It would be appreciated if devs could implement reverse of "prepare weapons" (at least to turn off Raduga sight part) command from pilot seat to Petrovich. Reason is that sometimes we forget to tell him to close Raduga sight before we start evading and it is possible to topple gyros. While we can jump in front seat and shut it down, I have found out that flying at really high elevations it is impossible for Petrovich to maintain flight. Thanks2 points
-
Instant buy, enjoyed the first 2 campaign s very much.2 points
-
I wonder if this is again one of those 1st and only posts of a new account to keep us busy.2 points
-
Meine Vermutung ist, dass Track-Aufzeichnungen sowie Track-Wiedergaben im Allgemeinen sehr gut funktionieren, wenn das System und insbesondere CPU und RAM nicht am Limit sind. Wenn es irgendwo eng wird und die FPS in den Keller fallen, kann man sich vermutlich leicht vorstellen, dass schon beim Aufzeichnen aller Eingaben kleine Fehler passieren können, und wenn man sich später die Wiedergabe anschaut, können diese minimalen Abweichungen dazu führen, dass die Wiedergabe scheinbar gar nichts mehr damit zu tun hat, was man vorher erlebt hat. Wie schon gesagt wurde kann Zeitraffer das Problem drastisch verschärfen. Beim Testen von Missionen nutze ich oft Replays und darin Zeitraffer, und selbst komplexe Missionen laufen manchmal 30 Minuten lang synchron mit dem, was ich vorher erlebt habe, sodass ich an der richtigen Stelle die Kontrolle übernehmen und eine bestimmte Situation erneut testen kann - und dabei habe ich wahrlich kein High-End-System. Der Grund, dass wir immer und immer wieder nach kurzen (!) Tracks fragen, ist, dass das Frage-und-Antwort-Spiel einfach brutal lange dauert, wenn jemand lang und breit ein Problem schildert und dazu sagt "ich habe aber alles richtig gemacht", und nach 3 Tagen hin und her stellt sich raus, der Spieler hat irgendeinen Schalter vergessen oder ein System grundlegend falsch verstanden. Das hätte man im Track nach 1 Minute gesehen. Und zweitens bieten uns Tracks einen Sprung direkt in die Situation: welches Flugzeug genau (wir haben allein 3 Varianten der A-10, mehrere Varianten bestimmter Warbirds, bis vor kurzem gab es 3 Varianten der Gazelle), welche Zuladung, welche Bedingungen (Status des Triebwerks, im Missionseditor festgelegte Systemausfälle, ...), welche Flughöhe, Wind, Luftdruck, Wolken, Außentemperatur... leider sind die allermeisten Forenteilnehmer gnadenlos überfordert, wenigstens einen Bruchteil der relevanten Informationen zu liefern, wenn sie ein Problem oder einen Fehler melden oder Hilfe suchen. (*) Ein Track kann viele der Fragen direkt beantworten. (*) Und das Forum ist noch der pure Himmel im Vergleich zu Discord. Und weil wir alle wissen, dass die Wiedergabe von Tracks ungenau ist und im schlimmsten Fall schon beim Start auseinanderdriftet, ist es so wichtig, dass man die zugrunde liegende Situation reproduziert und dann einen kurzen Track erzeugt, der nur exakt das geschilderte Problem zeigt. Positiver Nebeneffekt: Beim Versuch, ein Problem zu reproduzieren, findet man oft raus, was das Problem war. Einige meiner besten Fehlerberichte sind die, die ich nie abgeschickt habe, weil mir beim Reproduzieren klar wurde, was mein Fehler war.2 points
-
Once I've finished mine, I hope to be able to share everything with clear instructions. I will be sharing the code as well as gerber zip files ready to upload to PCBWay or similar, so anyone who wants to build one, will only have to know how to solder a bit, crimp cables and 3D print. But everything else will be provided.2 points
-
I'm nowhere near into the flow dynamics, but I assume, with the incoming air flow, the engine performance has advantages going into higher RPM. You can disable A/B above Mach 1.4 and being in the overspeed regime. But you need to stay at MIL power with the throttle until RPM goes out of overspeed when speed decreases to below Mach 1.4.2 points
-
Вот здесь видео записал. Поттормаживает немного но голосом тоже поясняю.2 points
-
Easy peasy, go ballistic, when a piece is floating nearby grab it.2 points
-
That's from the MLU M1 manual, not applicable to the DCS variant.2 points
-
We're not in your F-16 issue thread, we're in your carrier issue thread. What I'm saying is that since aircraft can never take off again from carriers in DCS at the moment (known limitation of the sim), the RefuArLanding cannot be used with carriers.2 points
-
Вот Вы реально сами сейчас не замечаете никакой иронии??? Блин, вот откуда вы все мамкины советчики и хакеры вылезаете? Есть простые вещи для понимания (даже среднего ума) - при старте игры один поток постоянно грузит ядро на 100%. Любой человек, работающий программистом, скажет вам это это баг и что такого на ровном месте быть не должно. И ЕД программист первым делом проверит нет ли где в коде Busy-Wait проблемы. Нет, тут же вылезает пара советчиков и начинают доказывать в хамской манере что всё норм и всё правильно и так и должно быть, а так же рассказывать мне чем я должен заниматься по жизни. У вас всё нормально вообще, или у вас в жизни какие то проблемы с самореализацией?2 points
-
This is accurate and not a bug. If there is no active sensor providing the height above target then the CDIP calculation pulls the current designation or closest steerpoint elevation and uses that. Suite 4 as implemented does not have DTED tied into its bombing calculations. Your only sources right now for height above target are SYS, wwhich isaircraft barometric or GPS corrected altitude compared to the steerpoint elevation. Or LAS which is the target pod latched to the CDIP reticle with the laser firing. The other parts of the height above target hierarchy: Air to ground radar ranging, Radar altimeter, HRM and Passive are not implemented. of those, only Radar altimeter an Air to ground radar ranging would help with CDIP bombing.2 points
-
In all respects, this is a rather superficial problem, but the Mig-21 module is the only one I know of that doesn't let you bind things to the mouse. In fact, the whole column is greyed out in the controls options. I'd like to be able to bind a mouse button to open up the \ menu as in other planes, however there is no way to do that with this module.1 point
-
Do you use that modifier as "modifier" or is it a "switch"? I've never had such an issue with a modifier, but I can imagine it with the "switch" (which I totally ignored until today).1 point
-
That’s it1 point
-
Ваша правда! Проверил - при аккуратном выравнивании самолёт ведёт себя корректно (также, как и с поднятием колеса на взлёте, активный подрыв ручки с удержанием - и нос подымается на 80 - 90 км/ч). Не всегда удаётся, на три нормальных посадки семь "шлепков", сказываются короткий джойстик и отсутствие чувства "пятой точки". Одно будем удлинять, другое практиковать. Осталось попросить разработчиков ввести модель повреждений (хотя бы).1 point
-
1 point
-
What's not a thing about it? It is most definitely already working in DCS, I've had my bombs guided in by my friend before and had no issues. And I've guided his bombs too. Plus you can do it from JTAC ground or AFAC aircraft units too if you want an AI to lase for you.1 point
-
Bei der Komplexität der Simulation und der zeitkritischen Komponente des Berechnens kann man hier wohl von soetwas wie dem "Schmetterlingseffekt" ausgehen.1 point
-
And why is this posted in the La-7 thread???1 point
-
Merci les gars pour ces explications nous sommes ébloui.....1 point
-
The AccelStepper version in that thread worked, once I made a patch PCB to enable me to delete the stepper driver. It is not perfect, despite playing around with the max steps in the stepper config, the position of the pointer doesn't properly match the 'real' position, but it will pass through the zero point with out a step forwards or backwards, so the rotation is smooth and doesn't detract. I also had no issues getting it functioning with RS485 either Puzzlingly the max steps value had to be changed when I went from the USB to the RS485 version, I don't know of any logical reason why that would be. Nonetheless, compared to the old version it is a massive improvement. In case anyone wants to use it here is the final sketch, which includes the fully functioning Baro set and Alt/Elec/Pneu rotary switch //#define DCSBIOS_IRQ_SERIAL #define DCSBIOS_RS485_SLAVE 100 #define TXENABLE_PIN 2 #include <AccelStepper.h> #include "DcsBios.h" struct StepperConfig { unsigned int maxSteps; unsigned int acceleration; unsigned int maxSpeed; }; class Vid60Stepper : public DcsBios::Int16Buffer { private: AccelStepper& stepper; StepperConfig& stepperConfig; inline bool zeroDetected() { return digitalRead(irDetectorPin) == 1; } unsigned int (*map_function)(unsigned int); unsigned char initState; long currentStepperPosition; long lastAccelStepperPosition; unsigned char irDetectorPin; long zeroOffset; bool movingForward; bool lastZeroDetectState; long normalizeStepperPosition(long pos) { if (pos < 0) return pos + stepperConfig.maxSteps; if (pos >= stepperConfig.maxSteps) return pos - stepperConfig.maxSteps; return pos; } void updateCurrentStepperPosition() { // adjust currentStepperPosition to include the distance our stepper motor // was moved since we last updated it long movementSinceLastUpdate = stepper.currentPosition() - lastAccelStepperPosition; currentStepperPosition = normalizeStepperPosition(currentStepperPosition + movementSinceLastUpdate); lastAccelStepperPosition = stepper.currentPosition(); } public: Vid60Stepper(unsigned int address, AccelStepper& stepper, StepperConfig& stepperConfig, unsigned char irDetectorPin, long zeroOffset, unsigned int (*map_function)(unsigned int)) : Int16Buffer(address), stepper(stepper), stepperConfig(stepperConfig), irDetectorPin(irDetectorPin), zeroOffset(zeroOffset), map_function(map_function), initState(0), currentStepperPosition(0), lastAccelStepperPosition(0) { } virtual void loop() { if (initState == 0) { // not initialized yet pinMode(irDetectorPin, INPUT); stepper.setMaxSpeed(stepperConfig.maxSpeed); stepper.setSpeed(200); initState = 1; } if (initState == 1) { // move off zero if already there so we always get movement on reset // (to verify that the stepper is working) if (zeroDetected()) { stepper.runSpeed(); } else { initState = 2; } } if (initState == 2) { // zeroing if (!zeroDetected()) { stepper.runSpeed(); } else { stepper.setAcceleration(stepperConfig.acceleration); stepper.runToNewPosition(stepper.currentPosition() + zeroOffset); // tell the AccelStepper library that we are at position zero stepper.setCurrentPosition(0); lastAccelStepperPosition = 0; // set stepper acceleration in steps per second per second // (default is zero) stepper.setAcceleration(stepperConfig.acceleration); lastZeroDetectState = true; initState = 3; } } if (initState == 3) { // running normally // recalibrate when passing through zero position bool currentZeroDetectState = zeroDetected(); if (!lastZeroDetectState && currentZeroDetectState && movingForward) { // we have moved from left to right into the 'zero detect window' // and are now at position 0 lastAccelStepperPosition = stepper.currentPosition(); currentStepperPosition = normalizeStepperPosition(zeroOffset); } else if (lastZeroDetectState && !currentZeroDetectState && !movingForward) { // we have moved from right to left out of the 'zero detect window' // and are now at position (maxSteps-1) lastAccelStepperPosition = stepper.currentPosition(); currentStepperPosition = normalizeStepperPosition(stepperConfig.maxSteps + zeroOffset); } lastZeroDetectState = currentZeroDetectState; if (hasUpdatedData()) { // convert data from DCS to a target position expressed as a number of steps long targetPosition = (long)map_function(getData()); updateCurrentStepperPosition(); long delta = targetPosition - currentStepperPosition; // if we would move more than 180 degree counterclockwise, move clockwise instead if (delta < -((long)(stepperConfig.maxSteps/2))) delta += stepperConfig.maxSteps; // if we would move more than 180 degree clockwise, move counterclockwise instead if (delta > (stepperConfig.maxSteps/2)) delta -= (long)stepperConfig.maxSteps; movingForward = (delta >= 0); // tell AccelStepper to move relative to the current position stepper.move(delta); } stepper.run(); } } }; /* modify below this line */ /* define stepper parameters multiple Vid60Stepper instances can share the same StepperConfig object */ struct StepperConfig stepperConfig = { 740, // maxSteps 8000, // acceleration 4000 // maxSpeed }; // define AccelStepper instance AccelStepper stepper1(AccelStepper::FULL4WIRE , 5, 4, 6, 7); // define Vid60Stepper class that uses the AccelStepper instance defined in the line above // v-- arbitrary name Vid60Stepper alt100ftPointer(0x107e, // DCS Bios address For stepper data stepper1, // name of AccelStepper instance stepperConfig, // StepperConfig struct instance 9, // IR Detector Pin (must be HIGH in zero position) 0, // zero offset [](unsigned int newValue) -> unsigned int { /* this function needs to map newValue to the correct number of steps */ return map(newValue, 0, 65535, 0, stepperConfig.maxSteps-1); }); void zero_stepper1(){ stepper1.setMaxSpeed(4000); // maximum speed in steps per second. Must be > 0. stepper1.setAcceleration(8000); // desired acceleration in steps per second per second. Must be > 0.0 stepper1.runToNewPosition(630); // go to the upper end stop delay(250); stepper1.setCurrentPosition(630); // set max steps stepper1.runToNewPosition(0); // go to the lower end stop delay(250); stepper1.setCurrentPosition(0); // set steps to zero } const byte altElectPneuPins[3] = {11, 10, 8}; DcsBios::SwitchMultiPos altElectPneu("ALT_ELECT_PNEU", altElectPneuPins, 3); DcsBios::RotaryEncoder altSetPressure("ALT_SET_PRESSURE", "-1600", "+1600", 12, 13); void setup() { DcsBios::setup(); zero_stepper1(); } void loop() { PORTB |= (1<<5); PORTB &= ~(1<<5); DcsBios::loop(); } cheers Les1 point
-
I can think of an easier way to make the hardcore realism-crowd happy: Make them buy the module all over again after they crashed or bent it. Or at least make them pay for the maintenance...1 point
-
I made this video to help out with getting, configuring and using Scratchpad and this mod. These both make life so much better in DCS.1 point
-
Hey guys, update - seems for some reason the unit that was transmitting the messages got its frequency completely reset to something else. I've fixed this, also updated the logic of how Chevy 4 and 5 get on station. Hope this works better now!1 point
-
Steerpoints can no longer be switched to automatic mode by pressing button number 4 (STPT) on the ICP and SEQ. Before we could.1 point
-
I wish the search and engage zone could be editable like the trigger zones, this would create proper Cap zones and border with just one click instead of using multiple scripts. Not bad uh ?1 point
-
В конце-концов для полноценного применения ПТУР с места КЭ есть Ка-50. Тоже прекрасный вертолет.1 point
-
Those are called scintillations. They are caused by the reflections of radar waves by the radar antennas, not because of interference. This is probably just the fact that you’re using mods. Also, the scintillation option in the Special menu specifies that it is in beta.1 point
-
Latest newsletter covering this was awesome!1 point
-
Official Nvidia marketing slides disagreee with that statement. First column shows DLSS 3 SR & DLAA running on all RTX cards. From a technical standpoint it wouldn't make a lot of sense any other way, would it? Maybe in some games it's integrated "wrongly" in a way that makes DLSS 3 synonymous with frame-gen, where upscaling only would be named (again: "wrongly") DLSS 2.0? Fact is, every RTX card can run upscaling, even if it's of the newer 3/3.5 iterations. This is based solely on Nvidia marketing, since i have no RTX card myself by the way.1 point
-
в задачах все это есть... но пока даты выполнения не стоит. п.3 вообще "завязан" на ядро DCS, там "есть чем заняться".. Но это рано или поздно будет сделано. п.2 через какое-то время сделаем (на все языки DCS видимо нужно сразу), там не должно быть сложно.. п.1 это посложней, но еще попробуем. И плиз не предлагайте "как -нить.. хоть скриптово"))1 point
-
if we wanted to take on these earlier scenarios with the current DCS hornet we would need to restrict crap our version has because as already mentioned the F-18 in DCS has systems it didnt have access to in the 80s and 90s and while it was a very good and capable plane in it's time regardless these systems give it quite an edge that it simply should not have in these timeframes, its not even just about balanced pubbie pvp servers but also about being able to enjoy authentic scenarios with authentic aircraft in general whether it be pve, pvp or singleplayer missions without having to worry about the plane you're flying being too new there's a reason for this there's been a number of pvp cold war servers that have tried adding the hornet and other blue mid 2000s aircraft in an attempt to have them stand in as the iconic earlier cold war versions DCS lacks while keeping red to period appropriate soviet aircraft. They usually die off after a short time unless some other important changes are made to who used what aircraft at what time for public pvp server balance as otherwise red players will quickly realize they're stuck on a steep uphill battle against aircraft that are 20+ years newer than the timeframe the mission is supposed to be set in let alone the aircraft they are allowed to use on these scenarios and just leave1 point
-
I know theres eastern alternatives, but.. yeah. I know the MB-339 is coming but that is only in use by a handful of very specific countries. There are some awesome modders out there who create amazing two seaters but unfortunately due to them not getting the full access to DCS, modded aircraft will never have full sync which makes them frustrating to fly. So for all our western virtual air forces out there who want to be able to train new pilots with correctly synced models and cockpits, PLEASE give us the ability to buy something in the ball park of a T-6 Texan II or T-38 Talon.1 point
-
AUTOLASE FAIL: can be caused by: 1 - gear or flaps extended, 2 - IAS <100 kts, 3 - targeting pod masked by fuselage, 4 - targeting pod not in tracking mode (Area, Point, INR, Rates) Generally means that the laser can put a laser point on the target.1 point






.thumb.jpeg.b9a38a8127c434fd6eba974eb2776d00.jpeg)























![Str][ker](https://forum.dcs.world/uploads/monthly_2023_10/YoutubeLogo4.thumb.png.c012656d0f4b6f059bec56392c65e92e.png)




-
Recently Browsing 0 members
- No registered users viewing this page.